Cursor 调试C++ ego planner代码 (4)随机地图生成器(map_generator)
目录
根据您的使用方式,我来为您提供使用 map_generator 的可视化方法。由于 map_generator 没有现成的 launch 文件,我们需要手动启动节点。
使用 map_generator 的方法
1. 启动 roscore(如果还没启动)
bash展开代码# 终端1:启动roscore
cd /xd_ws/ego-planner
export ROS_MASTER_URI=http://localhost:11311
source devel/setup.bash
roscore
2. 启动 map_generator 节点
bash展开代码# 终端2:启动map_generator
cd /xd_ws/ego-planner
export ROS_MASTER_URI=http://localhost:11311
source devel/setup.bash
rosrun map_generator random_forest
3. 启动 RViz 进行可视化
bash展开代码# 终端3:启动RViz
cd /xd_ws/ego-planner
export ROS_MASTER_URI=http://localhost:11311
source devel/setup.bash
rviz
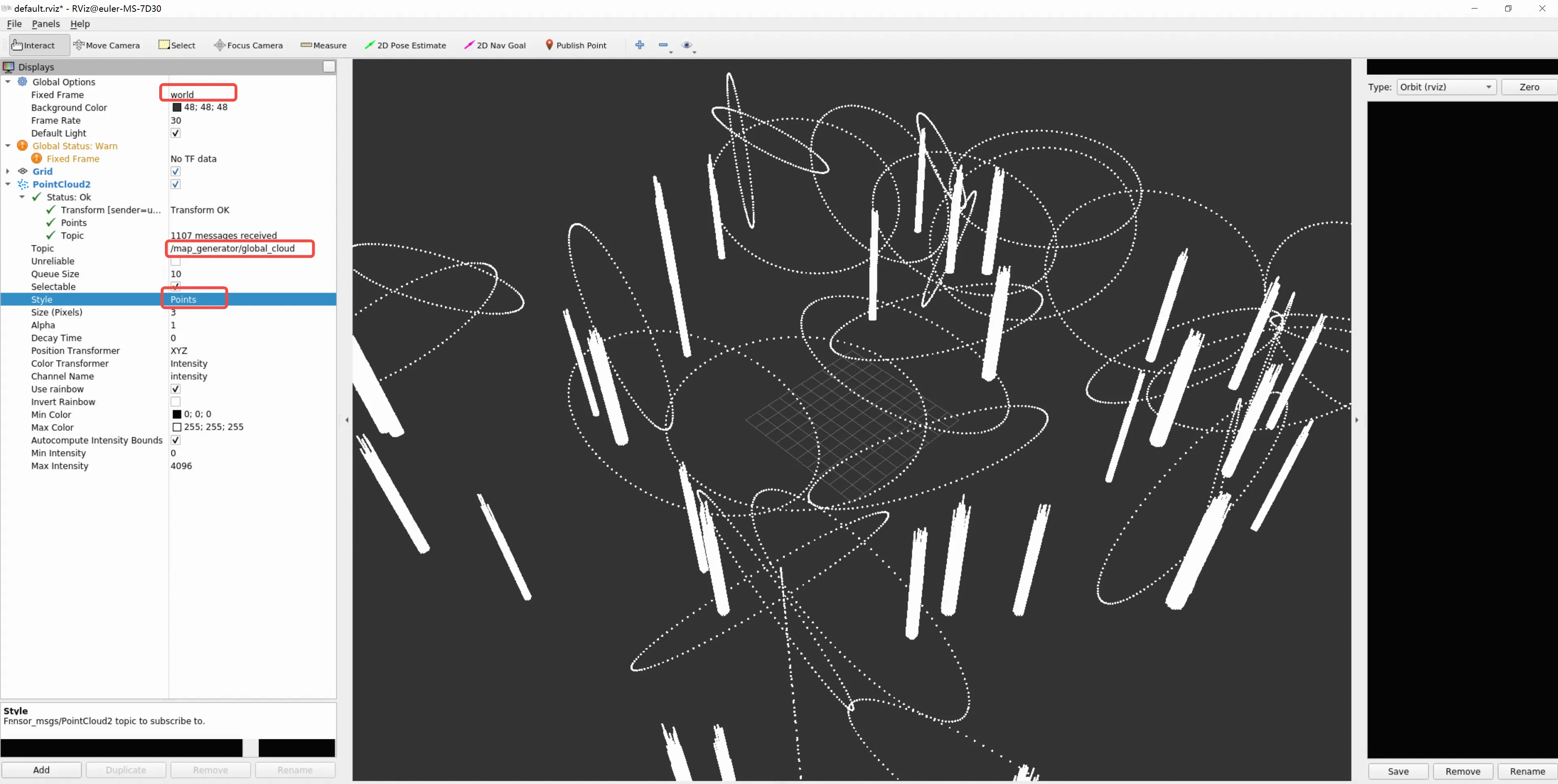
4. 在 RViz 中配置可视化
在 RViz 中添加以下显示项:
-
添加 PointCloud2 显示:
- 点击 "Add" → "PointCloud2"
- 设置 Topic 为
/map_generator/global_cloud(全局地图) - 设置 Topic 为
/map_generator/local_cloud(局部地图)
-
添加 TF 显示(可选):
- 点击 "Add" → "TF"
- 显示坐标系
-
设置 Fixed Frame:
- 在 "Global Options" 中设置 Fixed Frame 为 "world"
如果对你有用的话,可以打赏哦
打赏


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!
目录