目录
原有地图
src/uav_simulator/mockamap/src/mockamap.cpp 去ws:
bash展开代码# 使用 Debug 模式构建
catkin_make -DCMAKE_BUILD_TYPE=Debug
初始化环境:
bash展开代码source devel/setup.bash
删除以前得roscore的进程,可能经常用,用来清理环境:
bash展开代码pkill -f roscore pkill -f rosmaster
启动roscore:
bash展开代码# 终端1:启动roscore
cd /xd_ws/ego-planner
export ROS_MASTER_URI=http://localhost:11311
source devel/setup.bash
roscore
启动地图:
bash展开代码# 终端2:启动mockamap(使用相同端口)
cd /xd_ws/ego-planner
export ROS_MASTER_URI=http://localhost:11311
source devel/setup.bash
roslaunch mockamap mockamap.launch
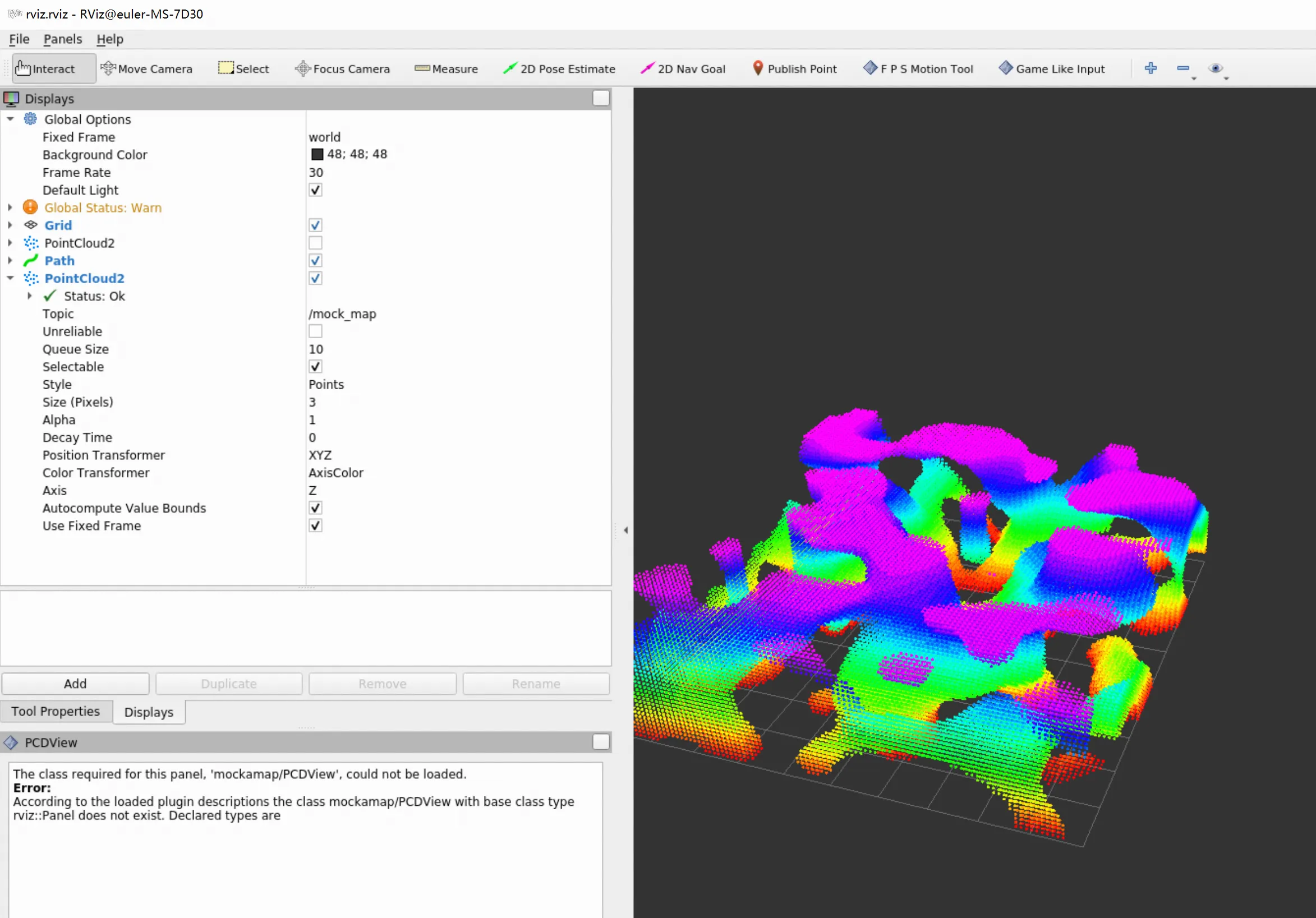
roslaunch mockamap mockamap.launch 自动加载 rviz.rviz 配置,配置文件在config里,在rviz里保存配置也是保存到配置文件来。
从launch文件中可以看到,RViz 启动时使用了配置文件:
bash展开代码<node name="rviz" pkg="rviz" type="rviz"
args="-d $(find mockamap)/config/rviz.rviz"/>
RViz 左边设置 Global Options 里的数据格式为world。在PointCloud2里,设置topic为 /mock_mao ,设置Style 为Points。
如何造自己的地图
新建节点文件,然后仿造原有地图节点,写文件,简单的地图,更易于学习:
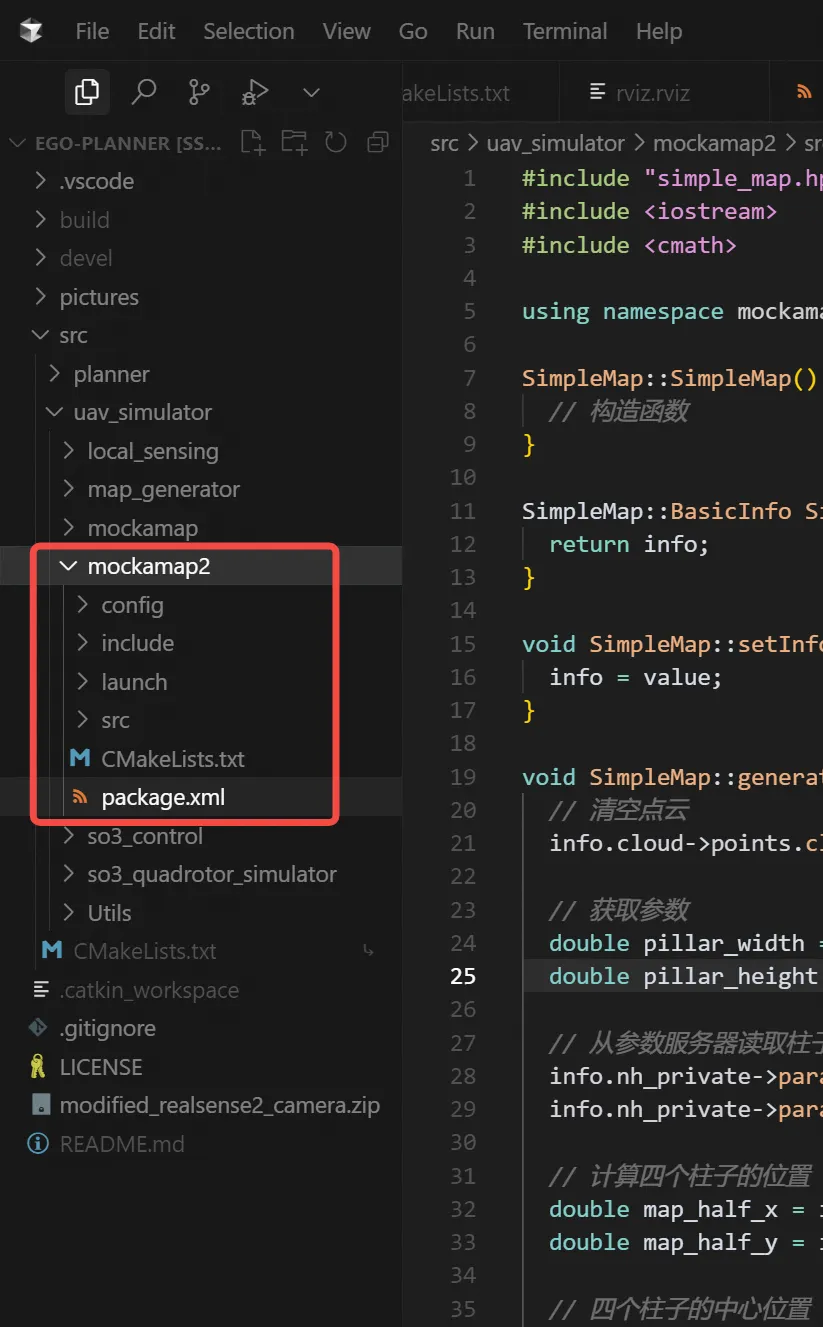
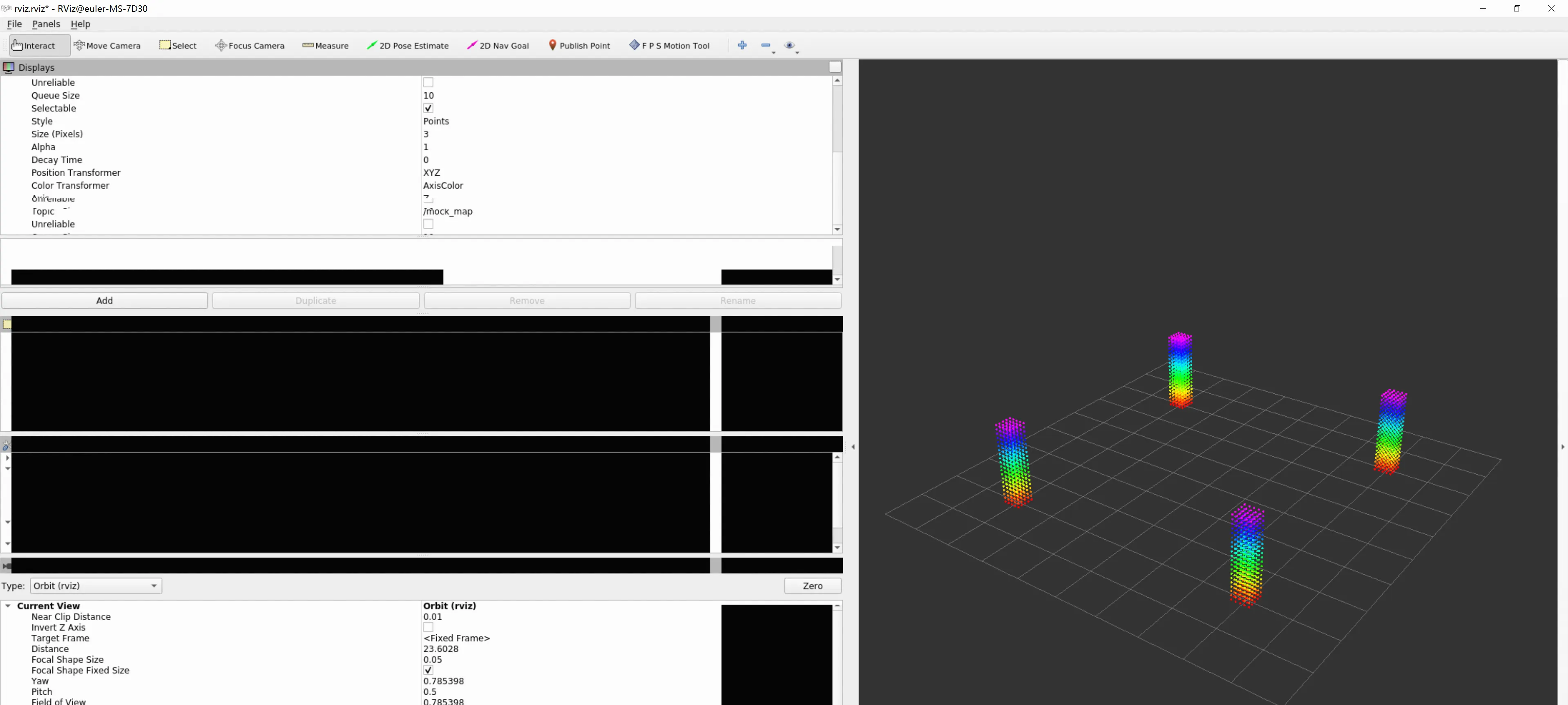
启动地图:
bash展开代码catkin_make && source devel/setup.bash && roslaunch mockamap2 mockamap2.launch
回顾包的作用
mockamap包的主要作用
mockamap是一个用于生成模拟3D环境地图的ROS包,主要用于UAV(无人机)仿真测试。它能够生成各种类型的3D障碍物环境,为路径规划算法提供测试场景。
主要功能:
-
生成多种类型的地图:
- Type 1: Perlin噪声3D地图 - 使用Perlin噪声算法生成自然的3D地形
- Type 2: 随机障碍物地图 - 生成随机分布的立方体障碍物
- Type 3: 2D迷宫地图 - 生成2D迷宫结构
- Type 4: 3D迷宫地图 - 生成复杂的3D迷宫结构
-
输出格式:
- 以PointCloud2格式发布地图数据
- 话题名:
/mock_map - 坐标系:
world
具体的地图生成方式:
-
Perlin噪声地图 (
perlin3D()):- 使用Perlin噪声算法生成自然的3D地形
- 可调节复杂度、填充率、分形细节等参数
- 适合模拟真实的山地或复杂地形
-
随机障碍物地图 (
randomMapGenerate()):- 在指定空间内随机生成立方体障碍物
- 可设置障碍物数量、尺寸范围
- 适合测试避障算法
-
迷宫地图 (
maze2D(),Maze3DGen()):- 生成具有通道和墙壁的迷宫结构
- 2D迷宫使用递归分割算法
- 3D迷宫基于Voronoi图原理生成
关键参数:
resolution: 地图分辨率(默认0.1米)x_length,y_length,z_length: 地图尺寸seed: 随机种子,确保可重复性type: 地图类型(1-4)
mockamap的type参数控制层级
1. 最终控制者:用户/开发者
用户通过选择不同的launch文件来控制type参数:
mockamap.launch:type = 1(Perlin噪声3D地图)perlin3d.launch:type = 1(Perlin噪声3D地图)post2d.launch:type = 2(随机障碍物地图)maze2d.launch:type = 3(2D迷宫地图)maze3d.launch:type = 4(3D迷宫地图)
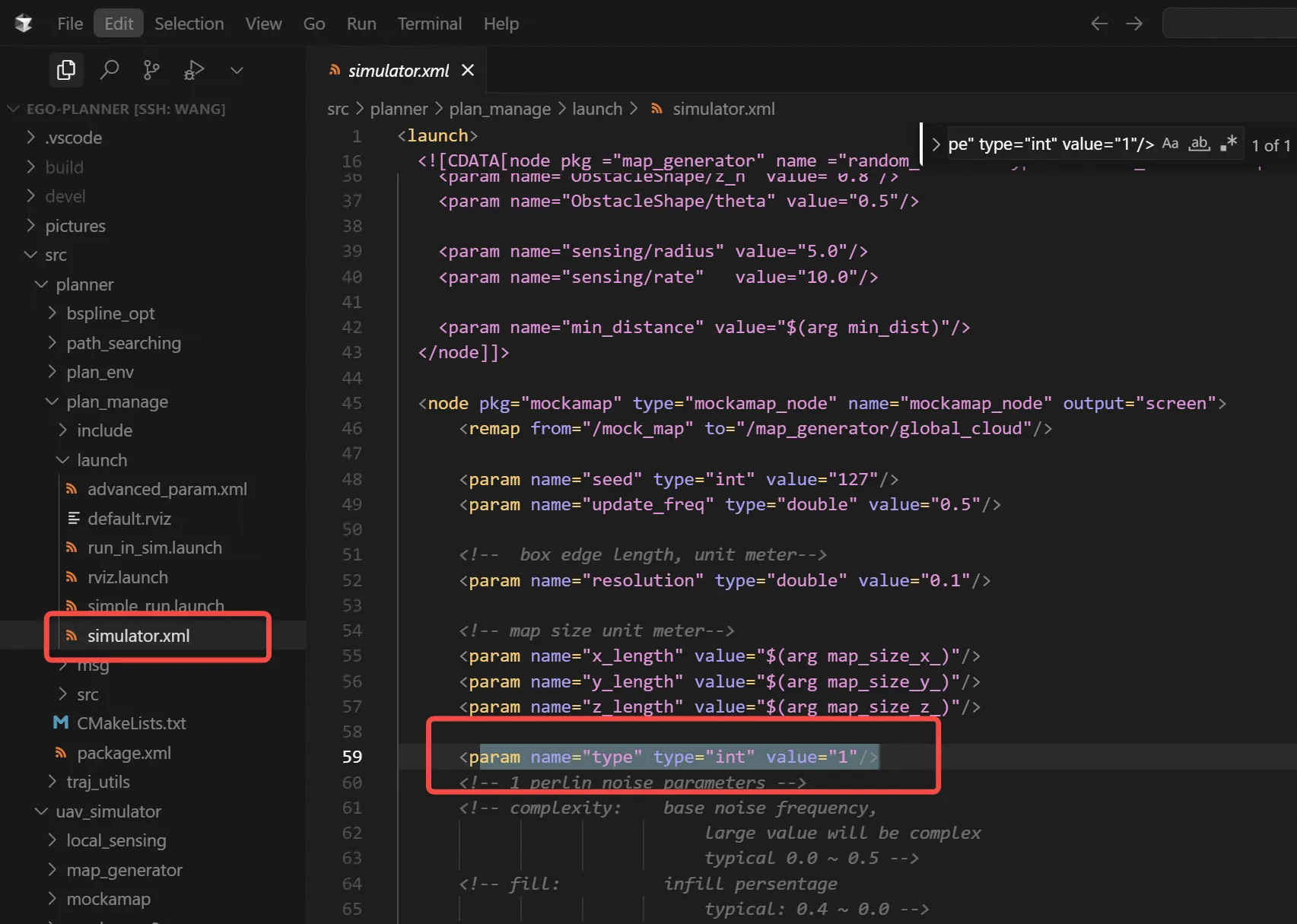
2. 主要集成控制:simulator.xml
在ego-planner的主要仿真启动文件中,simulator.xml硬编码了:
xml展开代码<param name="type" type="int" value="1"/>
这意味着在ego-planner的仿真环境中,默认使用Perlin噪声3D地图。


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!