ROS ego-planner
目录
测试
bash展开代码docker pull mzahana/ros-noetic-cuda11.4.2
bash展开代码docker run \ -e QT_X11_NO_MITSHM=1 \ -e DISPLAY \ --net=host \ --gpus all \ -v ~/.Xauthority:/root/.Xauthority:rw \ -v ~/tmp/.X11-unix:/tmp/.X11-unix:ro \ -v ~/out_home:/out_home \ -it mzahana/ros-noetic-cuda11.4.2 bash
bash展开代码sudo apt-get install libarmadillo-dev -y
git clone https://github.com/ZJU-FAST-Lab/ego-planner.git
cd ego-planner
bash展开代码# 修改cuda支持
sudo apt update && sudo apt install -y \
build-essential \
gcc g++ \
cmake \
make \
git \
vim \
wget \
curl \
htop \
pkg-config \
libtool \
autoconf \
automake \
libssl-dev \
zlib1g-dev \
libbz2-dev \
libreadline-dev \
libncurses-dev \
libsqlite3-dev \
libffi-dev \
liblzma-dev
bash展开代码# 去这个文件修改cuda支持
vim src/uav_simulator/local_sensing/CMakeLists.txt
# 编译
catkin_make
# 运行
source devel/setup.bash
roslaunch ego_planner simple_run.launch
标准编译
bash展开代码sudo apt-get install libarmadillo-dev -y
在代码目录里搞:
bash展开代码catkin_make -DCMAKE_BUILD_TYPE=Release
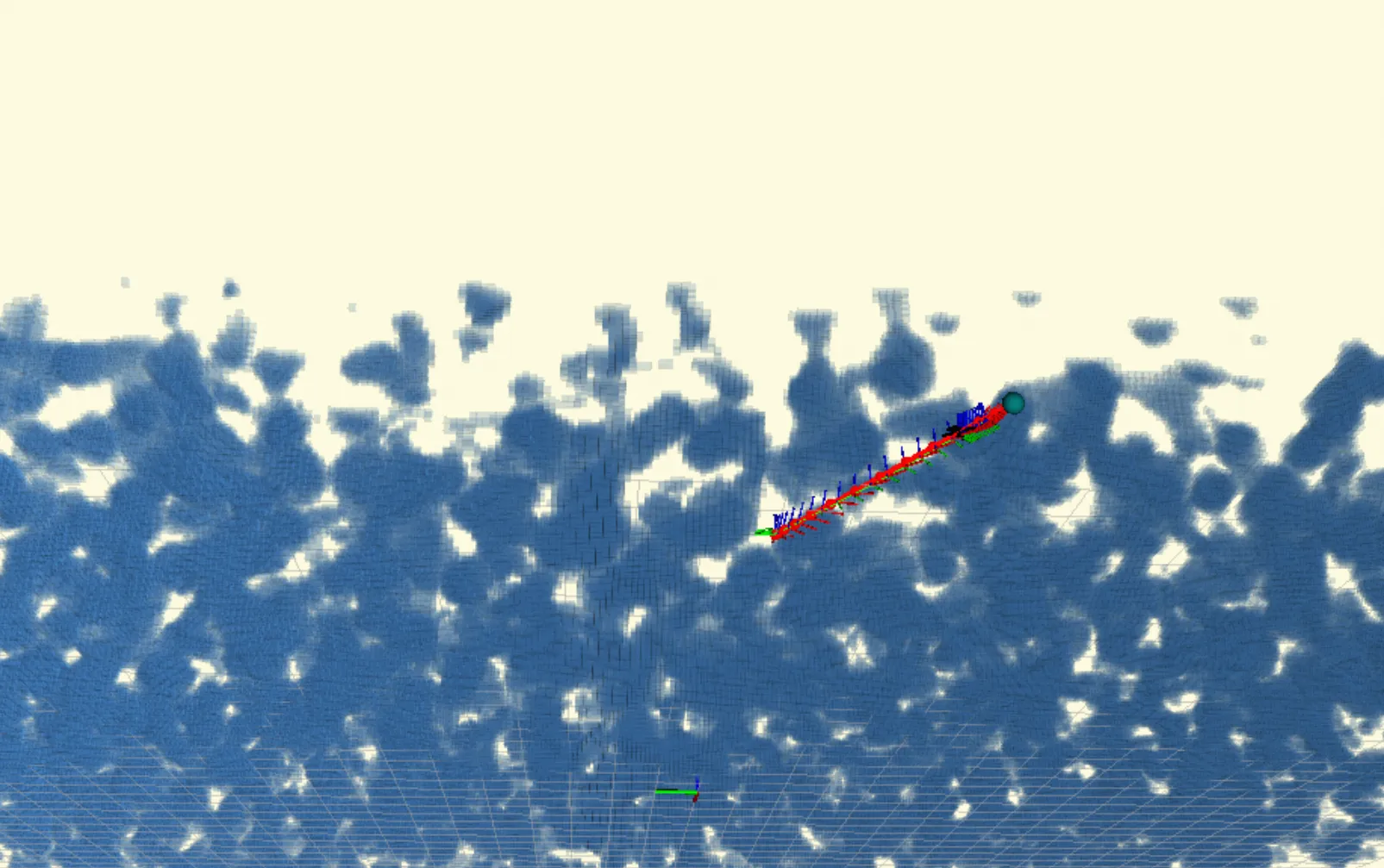
在 ego-planner/ 文件夹的终端中,打开 rviz 进行可视化和交互:
bash展开代码source devel/setup.bash
roslaunch ego_planner rviz.launch
在 ego-planner/ 的另一个终端中,在仿真中运行规划器:
bash展开代码docker exec -it 5f52b93a6f8a bash
source devel/setup.bash
roslaunch ego_planner run_in_sim.launch
如果对你有用的话,可以打赏哦
打赏


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!
目录