ROS Docker可视化界面
https://blog.csdn.net/zkk9527/article/details/121159353
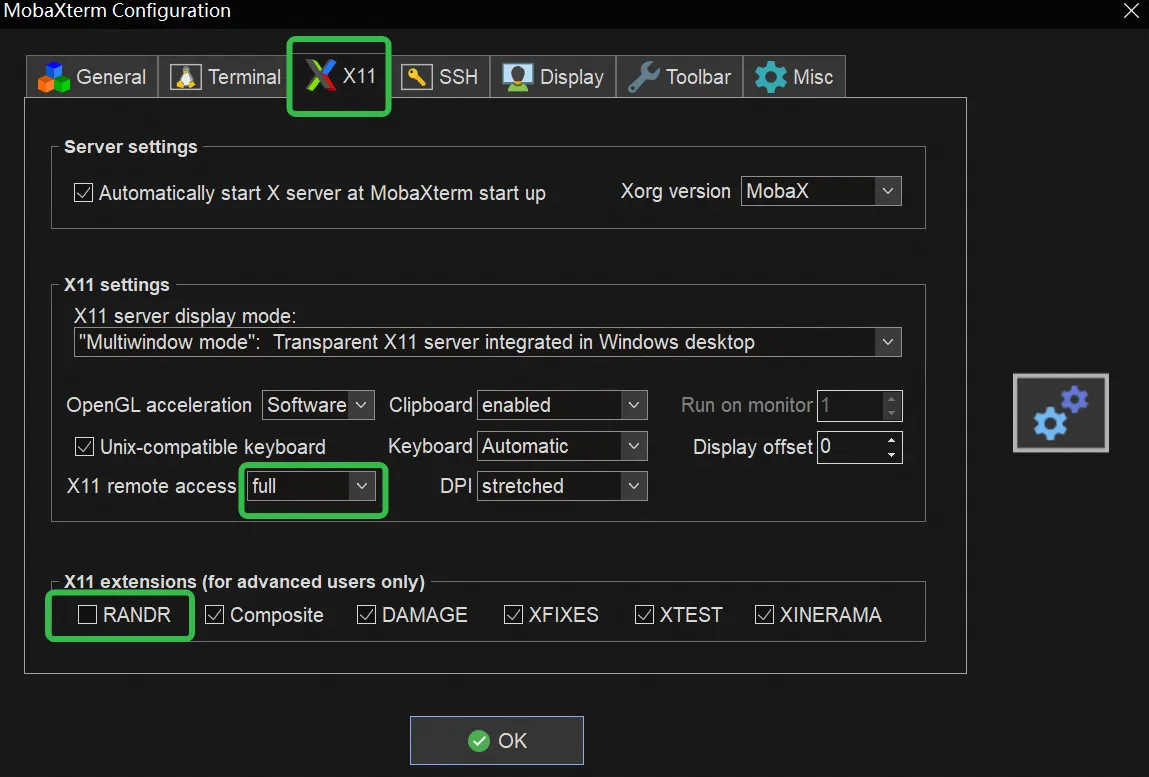
设置full和关闭RANDR:
SSH进入服务器,安装这几个:
bash展开代码sudo apt update sudo apt install x11-xserver-utils sudo apt install xfonts-base xfonts-utils
执行这个
bash展开代码xhost +
可以看到:
bash展开代码(base) xd@xd-OptiPlex-3070:~$ xhost + access control disabled, clients can connect from any host
每次SSH进入服务器后均要执行 xhost +
执行这个命令:
bash展开代码xclock
看到时钟弹出来则说明xhost + 设置是ok的。
拉这个镜像:
bash展开代码docker pull zkjoker/laserslam:v4
运行容器:
bash展开代码docker run \ --name visual_use \ -e QT_X11_NO_MITSHM=1 \ -e DISPLAY \ --net=host \ -v ~/.Xauthority:/root/.Xauthority:rw \ -v ~/tmp/.X11-unix:/tmp/.X11-unix:ro \ -v ~/out_home:/out_home \ -it zkjoker/laserslam:v4 bash
分析一下:
这个 docker run 命令的原理涉及多个 Docker 和 X11 相关的概念,我来逐步解释:
- 基本容器运行
bash展开代码docker run --name visual_use -it zkjoker/laserslam:v4 bash
- 从镜像
zkjoker/laserslam:v4创建并运行一个名为visual_use的容器 -it表示以交互模式运行并分配伪终端- 最后执行
bash命令进入容器 shell
- X11 图形显示相关参数
bash展开代码-e QT_X11_NO_MITSHM=1 \ -e DISPLAY \ --net=host \ -v ~/.Xauthority:/root/.Xauthority:rw \ -v ~/tmp/.X11-unix:/tmp/.X11-unix:ro \
这些参数是为了让容器内的 GUI 程序能够显示在宿主机的 X11 服务器上:
-e QT_X11_NO_MITSHM=1:禁用 QT 的共享内存扩展,解决某些 X11 兼容性问题-e DISPLAY:传递宿主机的 DISPLAY 环境变量到容器--net=host:使用主机网络模式,使容器能直接访问主机的 X11 服务-v ~/.Xauthority:/root/.Xauthority:rw:共享 X11 认证 cookie 文件-v ~/tmp/.X11-unix:/tmp/.X11-unix:ro:共享 X11 的 Unix 域套接字
- 数据卷挂载
bash展开代码-v ~/out_home:/out_home
将宿主机的 ~/out_home 目录挂载到容器的 /out_home,用于数据持久化和共享
工作原理总结
- 网络模式:使用
--net=host让容器共享主机网络栈,使 X11 通信可以直接通过 localhost 进行 - X11 认证:通过共享
.Xauthority文件解决 X11 的身份验证问题 - 显示连接:通过共享
/tmp/.X11-unix目录让容器内程序可以连接到主机的 X11 服务器 - 环境变量:传递必要的 DISPLAY 变量告诉 GUI 程序连接到哪个显示服务器
进入容器后是显示出root@xd-OptiPlex-3070
bash展开代码(base) xd@xd-OptiPlex-3070:~$ docker run \
--name visual_use \
-e QT_X11_NO_MITSHM=1 \
-e DISPLAY \
--net=host \
-v ~/.Xauthority:/root/.Xauthority:rw \
-v ~/tmp/.X11-unix:/tmp/.X11-unix:ro \
-v ~/out_home:/out_home \
-it zkjoker/laserslam:v4 bash
root@xd-OptiPlex-3070:/#
执行这个:
bash展开代码bash /root/run_gmapping.sh
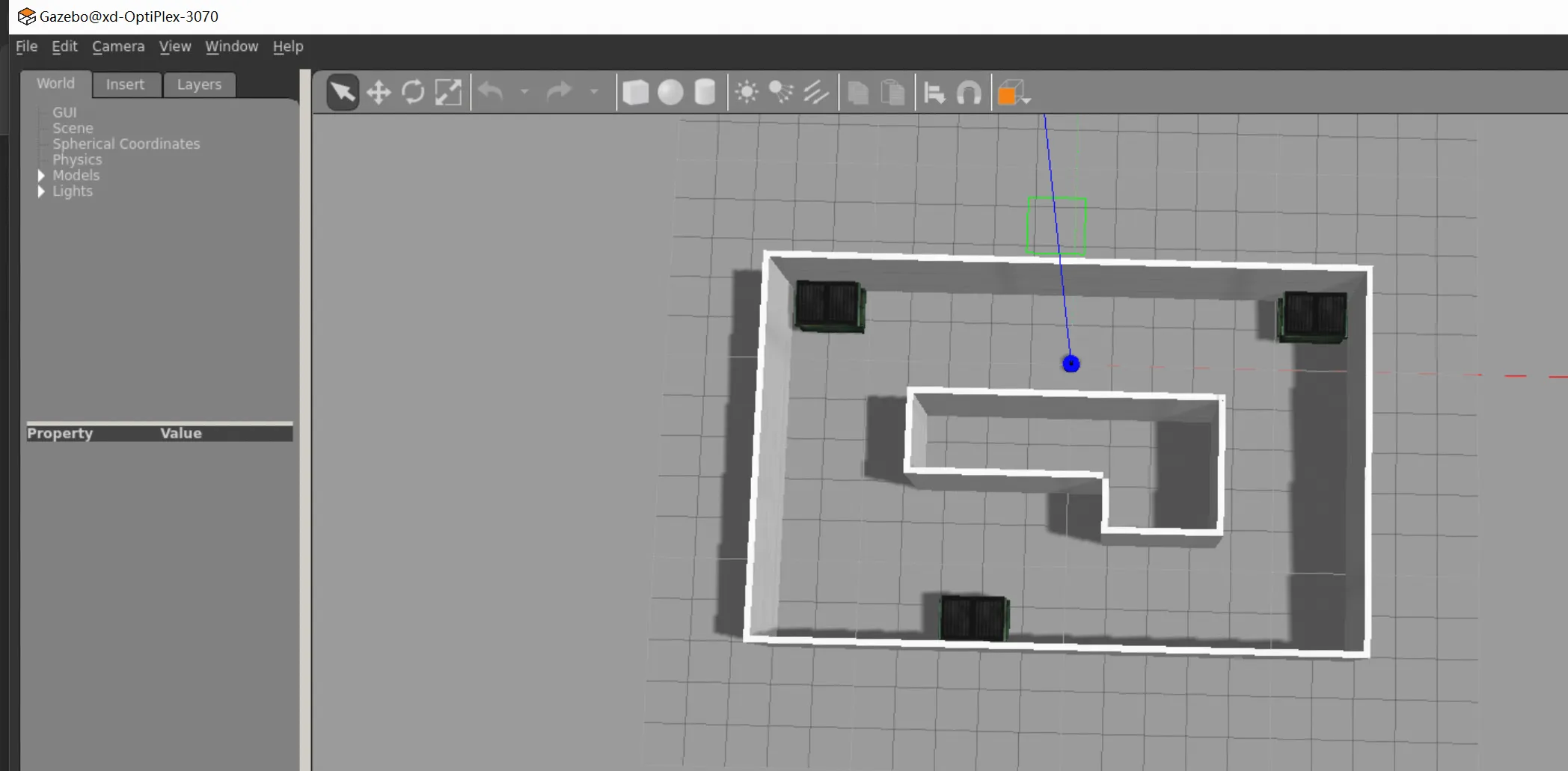
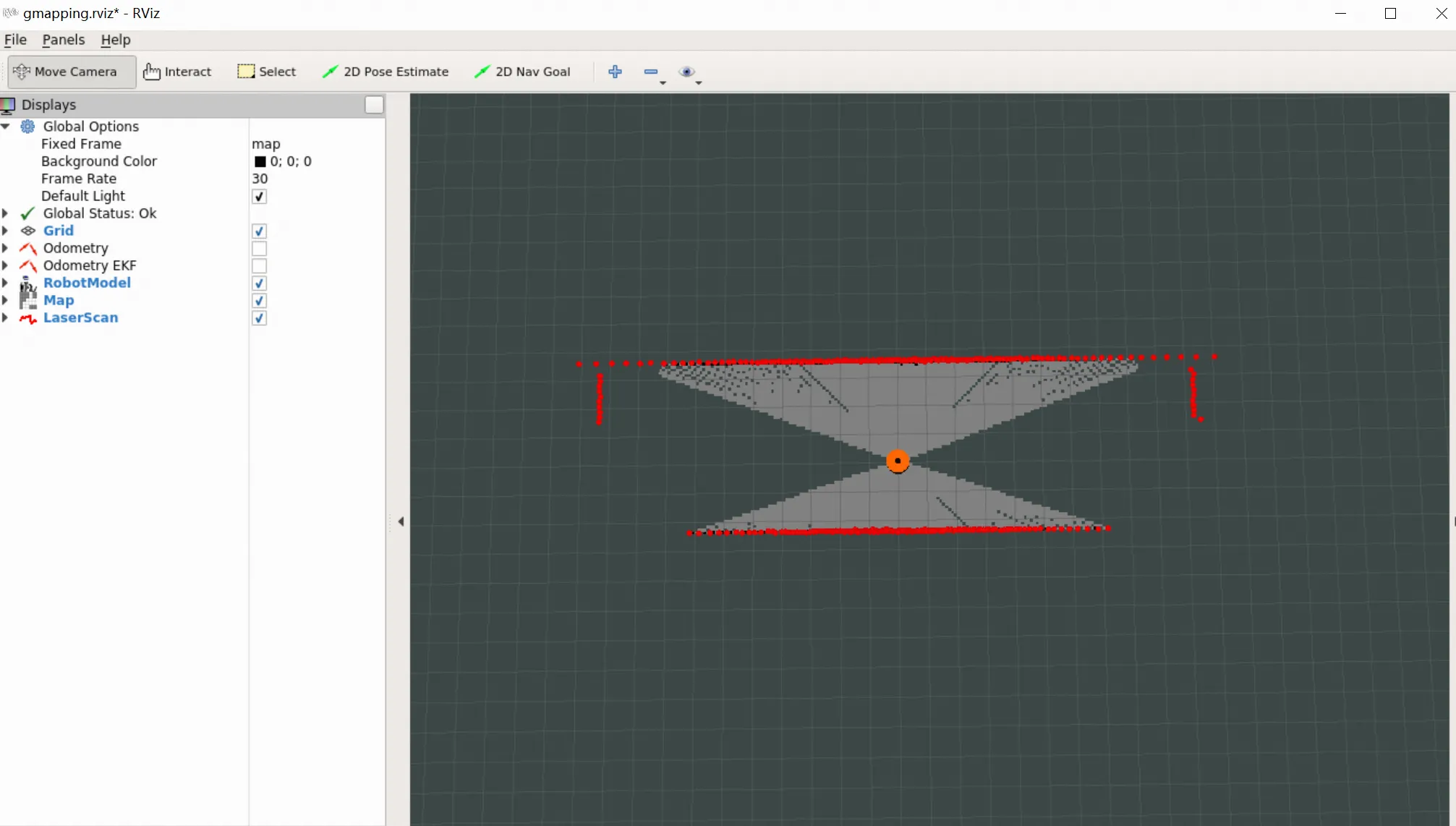
看到弹出这2个显示则表示显示成功:
分析一下
/root/run_gmapping.sh 里内容:
bash展开代码root@xd-OptiPlex-3070:/# cat /root/run_gmapping.sh
source /opt/ros/kinetic/setup.sh
source /root/catkin_ws/devel/setup.sh
sleep 1
(roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch)&
sleep 5
(roslaunch mbot_navigation gmapping_demo.launch)&
sleep 10
rosbag play control.bag
这是一个用于运行 gmapping SLAM 算法的 shell 脚本。让我逐步分析这个脚本的内容和功能:
- 环境设置:
bash展开代码source /opt/ros/kinetic/setup.sh
source /root/catkin_ws/devel/setup.sh
- 加载 ROS Kinetic 的环境设置
- 加载自定义工作空间 catkin_ws 的环境设置
- 启动 Gazebo 仿真环境:
bash展开代码(roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch)&
- 在后台(&)启动 Gazebo 仿真环境
- 使用 mbot_laser_nav_gazebo.launch 文件配置
- 包含机器人模型和激光雷达传感器
- 启动 gmapping SLAM:
bash展开代码(roslaunch mbot_navigation gmapping_demo.launch)&
- 在后台(&)启动 gmapping SLAM 算法
- 使用 gmapping_demo.launch 文件配置
- 用于创建环境地图
- 播放控制数据:
bash展开代码rosbag play control.bag
- 播放预先录制的 ROS bag 文件
- 包含控制指令或传感器数据
时间控制:
- 各步骤之间有 sleep 命令确保前一步完全启动:
- 初始 sleep 1 秒
- Gazebo 启动后 sleep 5 秒
- gmapping 启动后 sleep 10 秒
这个脚本的典型用途是:
- 在 Gazebo 中启动机器人仿真环境
- 运行 gmapping SLAM 算法构建地图
- 通过预录制的控制数据驱动机器人运动
如果对你有用的话,可以打赏哦
打赏


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!