51单片机 Proteus仿真 PID 电机转速调节 PWM 风扇转速调节
/*
PID的参数设置可以参照以下来进行:
展开代码参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大湾,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;
动差大来波动慢。微分时间应加长;
理想曲线两个波,前高后低4比1 ;
一看二调多分析,调节质量不会低;
*/
proteus仿真:
PID细节程序:
c展开代码void PIDControl() //pid偏差计算
{
e=SpeedSet-num;
duk=(Kp*(e-e1)+Ki*e+Kd*(e-2*e1+e2));
uk=uk1+duk;
out=(int)uk;
if(out>1000)
{
out=1000;
}
else if(out<0)
{
out=0;
}
uk1=uk;
e2=e1;
e1=e;
PWMTime=out;
}
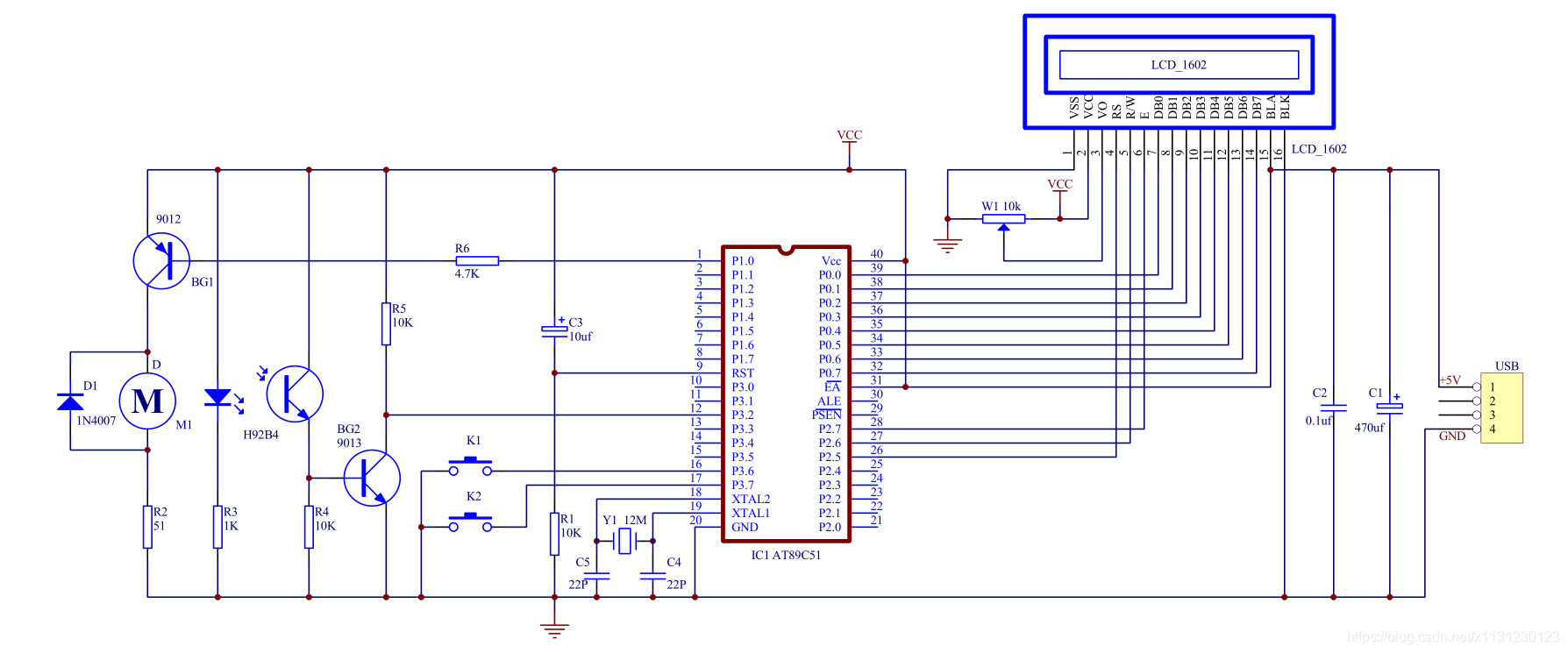
原理图:
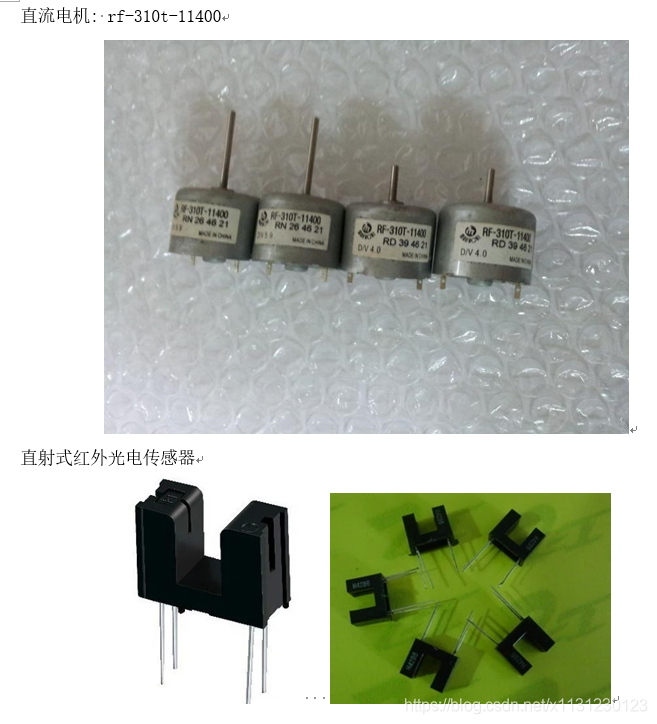
原件清单:

代码资源:
展开代码https://qq742971636.blog.csdn.net/article/details/139604313
展开代码https://docs.qq.com/sheet/DUEdqZ2lmbmR6UVdU?tab=BB08J2
如果对你有用的话,可以打赏哦
打赏


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!