ADRC算法平衡倒立摆的代码
python展开代码import numpy as np
import matplotlib.pyplot as plt
# 倒立摆参数
M = 1.0 # 小车质量 (kg)
m = 0.1 # 摆杆质量 (kg)
l = 0.5 # 摆杆长度 (m)
g = 9.81 # 重力加速度 (m/s²)
# 倒立摆动力学模型
def pendulum_model(state, F):
x, x_dot, theta, theta_dot = state
sin_theta = np.sin(theta)
cos_theta = np.cos(theta)
# 计算theta''
numerator = (M + m) * g * sin_theta - F * cos_theta - m * l * theta_dot ** 2 * sin_theta * cos_theta
denominator = l * (M + m - m * cos_theta ** 2)
denominator = np.sign(denominator) * max(1e-6, abs(denominator)) # 避免除以零
theta_ddot = numerator / denominator
# 计算x''
if abs(cos_theta) < 1e-6:
cos_theta = np.sign(cos_theta) * 1e-6
x_ddot = (g * sin_theta - l * theta_ddot) / cos_theta
return np.array([x_dot, x_ddot, theta_dot, theta_ddot])
class ADRC:
def __init__(self, dt, r, h, beta1, beta2, beta3, k1, k2, b0):
self.dt = dt
self.r = r
self.h = h
self.beta1 = beta1
self.beta2 = beta2
self.beta3 = beta3
self.k1 = k1
self.k2 = k2
self.b0 = b0
# 状态初始化
self.v1 = 0.0
self.v2 = 0.0
self.z1 = 0.0
self.z2 = 0.0
self.z3 = 0.0
self.u_prev = 0.0
def fhan(self, x1, x2, r, h):
d = r * h
d0 = h * d
y = x1 + h * x2
a0 = np.sqrt(d ** 2 + 8 * r * np.abs(y))
if np.abs(y) > d0:
a = x2 + (a0 - d) / 2 * np.sign(y)
else:
a = x2 + y / h
if np.abs(a) > d:
return -r * np.sign(a)
else:
return -r * a / d
def TD(self, target):
e = self.v1 - target
fh = self.fhan(e, self.v2, self.r, self.h)
self.v1 += self.dt * self.v2
self.v2 += self.dt * fh
return self.v1, self.v2
def ESO(self, y, u):
e = self.z1 - y
self.z1 += self.dt * (self.z2 - self.beta1 * e)
self.z2 += self.dt * (self.z3 + self.b0 * u - self.beta2 * e)
self.z3 += self.dt * (-self.beta3 * e)
return self.z1, self.z2, self.z3
def NLSEF(self, v1, v2, z1, z2):
e1 = v1 - z1
e2 = v2 - z2
return self.k1 * e1 + self.k2 * e2
def control(self, y, target):
v1, v2 = self.TD(target)
z1, z2, z3 = self.ESO(y, self.u_prev)
u0 = self.NLSEF(v1, v2, z1, z2)
u = (u0 - z3) / self.b0
self.u_prev = u
return u
# 仿真参数
dt = 0.001
sim_time = 5.0
t = np.arange(0, sim_time, dt)
n = len(t)
# 初始状态 (x, x_dot, theta, theta_dot)
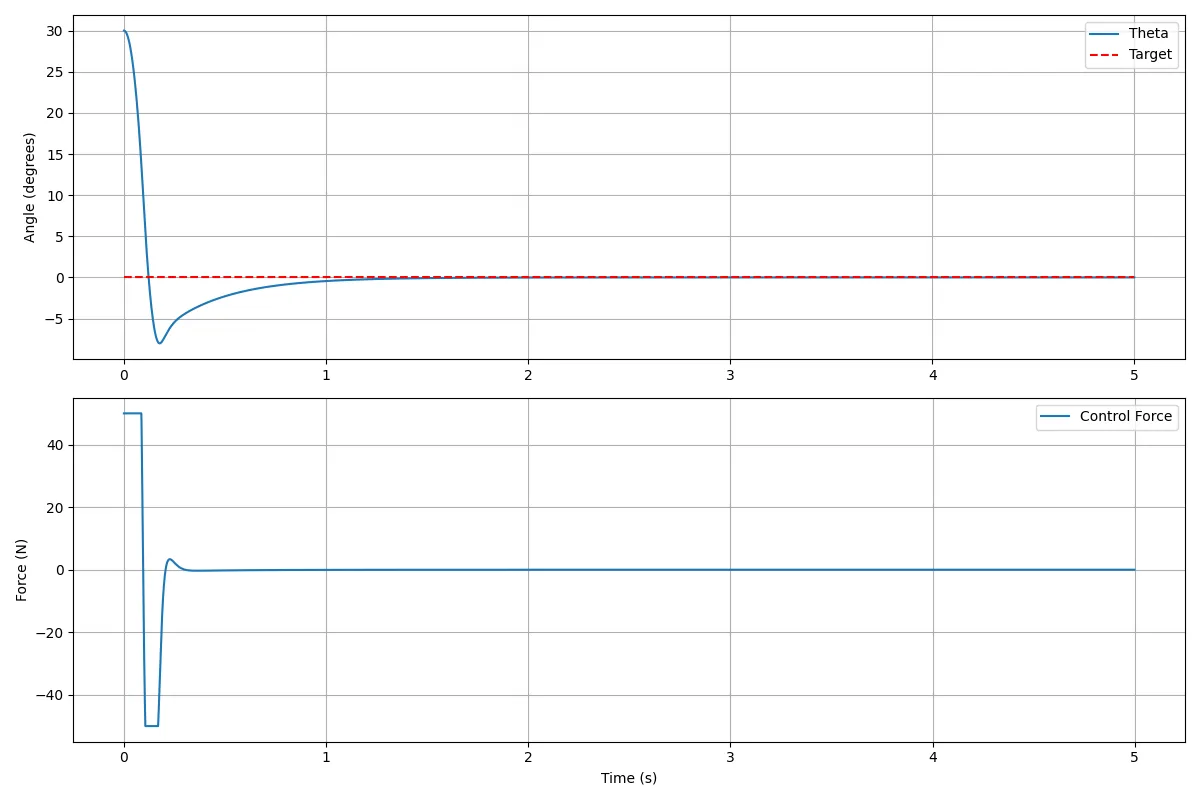
state = np.array([0.0, 0.0, np.pi / 6, 0.0]) # 初始角度30度
# ADRC参数
b0 = -1 / (l * M) # 控制增益
adrc = ADRC(
dt=dt,
r=30, # TD速度因子
h=dt, # TD滤波因子
beta1=300, # ESO参数 (3w)
beta2=30000, # (3w^2)
beta3=1e6, # (w^3)
k1=150, # NLSEF增益
k2=50,
b0=b0
)
# 初始化记录数组
states = np.zeros((n, 4))
F_history = np.zeros(n)
theta_history = np.zeros(n)
# 主循环
for i in range(n):
# 获取当前角度作为系统输出
current_theta = state[2]
# ADRC控制
F = adrc.control(current_theta, 0.0)
F = np.clip(F, -50, 50) # 限制控制力
# 记录状态
states[i] = state
F_history[i] = F
theta_history[i] = current_theta
# 更新状态
state_deriv = pendulum_model(state, F)
state += state_deriv * dt
# 角度归一化到[-pi, pi]
if state[2] > np.pi:
state[2] -= 2 * np.pi
elif state[2] < -np.pi:
state[2] += 2 * np.pi
# 绘图
plt.figure(figsize=(12, 8))
plt.subplot(2, 1, 1)
plt.plot(t, np.degrees(theta_history), label='Theta') # 将弧度转换为度数
plt.plot([0, sim_time], [0, 0], 'r--', label='Target')
plt.ylabel('Angle (degrees)') # 修改ylabel为度数
plt.legend()
plt.grid(True)
plt.subplot(2, 1, 2)
plt.plot(t, F_history, label='Control Force')
plt.ylabel('Force (N)')
plt.xlabel('Time (s)')
plt.legend()
plt.grid(True)
plt.tight_layout()
plt.show()
如果对你有用的话,可以打赏哦
打赏


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!