基本模型
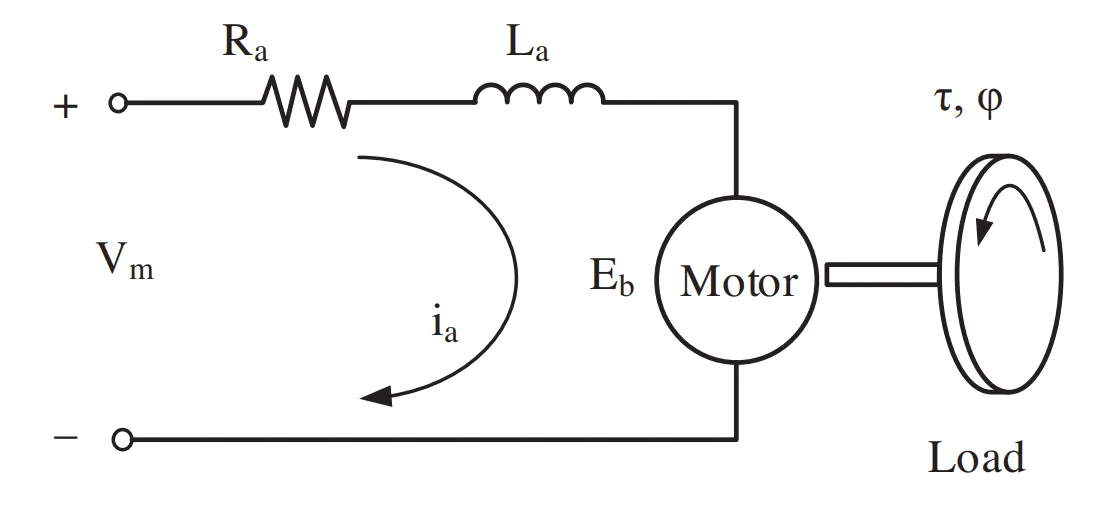
电机模型:
Vm=iaRa+Ladtdia+Eb
反电动势 (emf) Eb 与角速度 φ˙ 相关。
Eb=Kbφ˙
因为:La<<Ra
所以:
ia=RaVm−Kbφ˙
电机转矩 τ 和反电动势 (emf) 有关:
τ=Ktia=KtRaVm−Kbφ˙(公式4)
| 符号 | 单位 | 定义 |
|---|
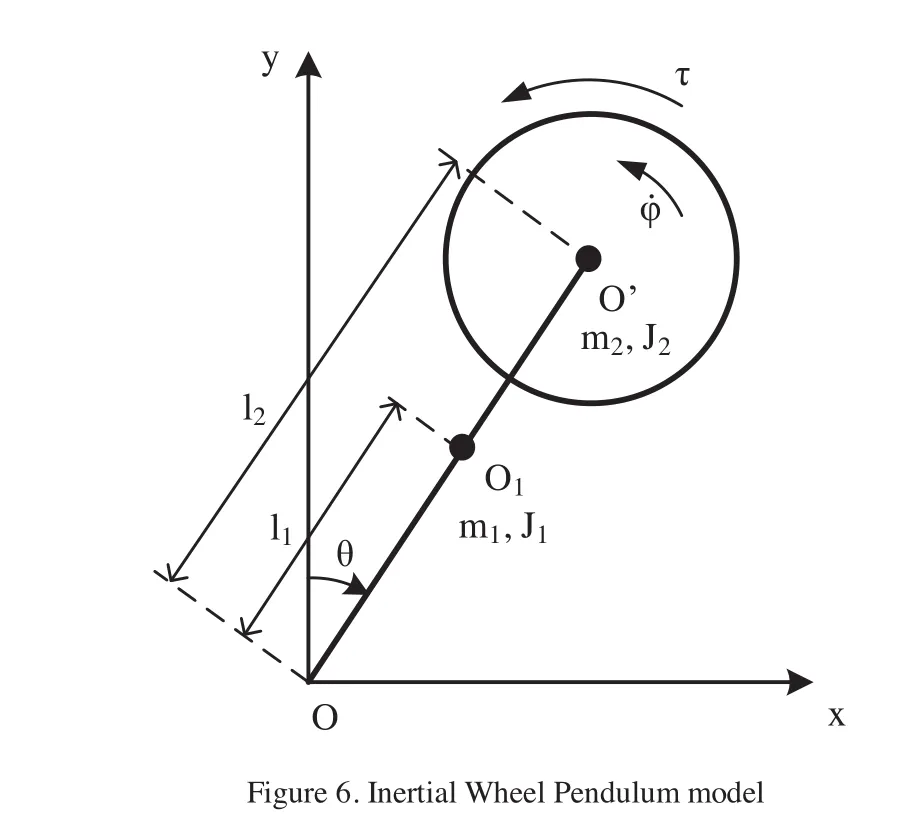
| θ | rad | 摆杆角度 |
| φ | rad | 惯性轮角度 |
| J₁ | kg.m² | 包括电机定子的摆杆转动惯量 |
| J₂ | kg.m² | 包括电机转子的轮子转动惯量 |
| c₁ | N.m.s/rad | 摆杆摩擦系数 |
| c₂ | N.m.s/rad | 轮子摩擦系数 |
| m₁ | kg | 摆杆和定子的质量 |
| m₂ | kg | 轮子和转子的质量 |
| l₁ | m | 从原点到摆杆重心的长度 |
| l₂ | m | 从原点到轮子重心的长度 |
| Kb | V/(rad/s) | 反电动势常数 |
| Kt | N.m/A | 电机扭矩常数 |
| Ra | Ω | 电枢绕组电阻 |
- 平动动能 Translational kinetic:
T1=21m1(l1θ˙)2+21m2(l2θ˙)2(公式6)
T2=21J1θ˙2+21J2(θ˙+φ˙)2(公式7)
系统的动能:
T=T1+T2=21(m1l12+m2l22+J1+J2)θ˙2+J2θ˙φ˙+21J2φ˙2(公式8)
以O点作为势能的基准。因此,势能为:
V=(m1l1+m2l2)gcos(θ)(公式9)
平面倒立摆的拉格朗日函数为:
L=T−V=21(m1l12+m2l22+J1+J2)θ˙2+J2θ˙φ˙+21J2φ˙2−(m1l1+m2l2)gcos(θ)(公式10)
瑞利耗散函数(Rayleigh Dissipation Function) 是分析力学中用于描述系统能量耗散(如摩擦力、空气阻力等非保守力)的数学工具。它通过广义速度的二次函数形式,将耗散力引入拉格朗日方程,从而简化含阻尼系统的动力学建模。
耗散能量:
R=21c1θ˙2+21c2φ˙2(公式11)
从拉格朗日方程得到的关于 θ 的旋转轴上的力矩为,这个公式是最后一个公式需要用的:
dtd(∂θ˙∂L)+∂θ˙∂R−∂θ∂L=0(公式12)⇔(m1l12+m2l22+J1+J2)θ¨+J2φ¨+c1θ˙−(m1l1+m2l2)gsin(θ)=0(公式13)
从拉格朗日方程得到的关于 φ 的旋转轴上的力矩为:
dtd(∂φ˙∂L)+∂φ˙∂R−∂φ∂L=τ(公式14)⇔J2(θ¨+φ¨)+c2φ˙=τ(公式15)
τ 是电机的扭矩。
因为:
τ=Ktia=KtRaVm−Kbφ˙(公式4)
由公式4和公式15可以得到:
J2(θ¨+φ¨)+c2φ˙=KtRaVm−Kbφ˙(公式16)
由公式13和公式16进行推理:
(m1l12+m2l22+J1+J2)θ¨+J2φ¨+c1θ˙−(m1l1+m2l2)gsin(θ)=0
线性化:
(m1l12+m2l22+J1+J2)θ¨+J2φ¨+c1θ˙−(m1l1+m2l2)gθ=0
之前有这个式子:
J2(θ¨+φ¨)+c2φ˙=KtRaVm−Kbφ˙
首先,我们将两个方程写出来:
(m1l12+m2l22+J1+J2)θ¨+J2φ¨+c1θ˙−(m1l1+m2l2)gθ=0
J2(θ¨+φ¨)+c2φ˙=KtRaVm−Kbφ˙
从第二个方程中,我们可以解出 φ¨:
J2θ¨+J2φ¨+c2φ˙=KtRaVm−Kbφ˙
J2φ¨=KtRaVm−Kbφ˙−J2θ¨−c2φ˙
φ¨=J2KtRaVm−Kbφ˙−J2θ¨−c2φ˙
将 φ¨ 代入第一个方程:
(m1l12+m2l22+J1+J2)θ¨+J2(J2KtRaVm−Kbφ˙−J2θ¨−c2φ˙)+c1θ˙−(m1l1+m2l2)gθ=0
化简后:
(m1l12+m2l22+J1+J2)θ¨+KtRaVm−Kbφ˙−J2θ¨−c2φ˙+c1θ˙−(m1l1+m2l2)gθ=0
合并同类项:
(m1l12+m2l22+J1)θ¨+c1θ˙−c2φ˙−(m1l1+m2l2)gθ=−KtRaVm−Kbφ˙
解出 θ¨:
θ¨=m1l12+m2l22+J1−KtRaVm−Kbφ˙−c1θ˙+c2φ˙+(m1l1+m2l2)gθ
然后将 θ¨ 代入 φ¨ 的表达式中,得到 φ¨:
φ¨=J2KtRaVm−Kbφ˙−J2(m1l12+m2l22+J1−KtRaVm−Kbφ˙−c1θ˙+c2φ˙+(m1l1+m2l2)gθ)−c2φ˙
简化一下就是:
θ¨φ¨=m1l12+m2l22+J1−KtRaVm−Kbφ˙−c1θ˙+(m1l1+m2l2)gθ+c2φ˙=J2(m1l12+m2l22+J1)KtRaVm−Kbφ˙(m1l12+m2l22+J1+J2)−c2φ˙(m1l12+m2l22+J1+J2)+J2c1θ˙−J2(m1l1+m2l2)gθ
这样,我们就得到了 θ¨ 和 φ¨ 的表达式。
- 电压输入 Vm 是控制变量
- 四个状态变量分别是 θ,θ˙,φ 和 φ˙
- 输出扭矩 τ 根据方程 (4) 计算
推状态空间方程
开始推状态空间方程。注意,都是遵循了:在平衡点附近线性化(sinθ≈θ)。
1. 定义状态变量:
x=x1x2x3x4=θθ˙φφ˙
2. 求出加速度项
有刚才的这两个公式:
θ¨φ¨=m1l12+m2l22+J1−KtRaVm−Kbφ˙−c1θ˙+(m1l1+m2l2)gθ+c2φ˙=J2(m1l12+m2l22+J1)KtRaVm−Kbφ˙(m1l12+m2l22+J1+J2)−c2φ˙(m1l12+m2l22+J1+J2)+J2c1θ˙−J2(m1l1+m2l2)gθ
3. 状态方程推导
根据状态变量定义,写出各状态的导数为:
x˙1x˙2x˙3x˙4=x2=m1l12+m2l22+J1−KtRaVm−Kbx4−c1x2+(m1l1+m2l2)gx1+c2x4=x4=J2IpKtRaVm−Kbx4(Ip+J2)−c2x4(Ip+J2)+J2c1x2−J2(m1l1+m2l2)gx1
总转动惯量: Ip=m1l12+m2l22+J1
4. 状态方程(平衡点 θ≈0)
在平衡点附近线性化(sinθ≈θ),得到状态方程(描述系统动态):
x˙=Ax+BVm
得到:
A=0Ip(m1l1+m2l2)g0−Ip(m1l1+m2l2)g1−Ipc10Ipc100000Ipc2+RaKtKb1J2Ip−KtKbRaIp+J2−c2(Ip+J2),B=0−RaIpKt0RaJ2IpKt(Ip+J2)
- 矩阵 A:描述了系统的状态变化与当前状态的关系。
- 矩阵 B:描述了系统的输入(如电压 Vm)对状态变化的影响。
5. 最终状态方程
最终状态空间方程
x˙y=Ax+BVm,=Cx+DVm
其中:
C=[1000],D=0
| 符号 | 单位 | 定义 |
|---|
| θ | rad | 摆杆角度 |
| φ | rad | 惯性轮角度 |
| J₁ | kg.m² | 包括电机定子的摆杆转动惯量 |
| J₂ | kg.m² | 包括电机转子的轮子转动惯量 |
| c₁ | N.m.s/rad | 摆杆摩擦系数 |
| c₂ | N.m.s/rad | 轮子摩擦系数 |
| m₁ | kg | 摆杆和定子的质量 |
| m₂ | kg | 轮子和转子的质量 |
| l₁ | m | 从原点到摆杆重心的长度 |
| l₂ | m | 从原点到轮子重心的长度 |
| Kb | V/(rad/s) | 反电动势常数 |
| Kt | N.m/A | 电机扭矩常数 |
| Ra | Ω | 电枢绕组电阻 |
给IWP的参数:
| Symbol | Value | Symbol | Value |
|---|
| J₁ | 0.01186 (kg·m²) | l₁ | 0.1053 (m) |
| J₂ | 0.0005711 (kg·m²) | l₂ | 0.14 (m) |
| c₁ | 0.04 (N·m·s/rad) | K_b | 0.0987 (V/(rad/s)) |
| c₂ | 0.0001 (N·m·s/rad) | K_t | 0.0987 (N·m/A) |
| m₁ | 0.826 (kg) | R_a | 1.5562 (Ω) |
| m₂ | 0.583 (kg) | | |
如果是三个状态变量
根据要求,将状态变量重新定义为 x=[θ,θ˙,φ˙]⊤,推导得到以下状态空间方程:
x˙=Ax+BVm
其中,系统矩阵 A 和输入矩阵 B 分别为:
A=0Ip(m1l1+m2l2)g−Ip(m1l1+m2l2)g1−Ipc1Ipc10IpKtKb/Ra+c2J2Ip−KtKbRaIp+J2−c2(Ip+J2),B=0−RaIpKtRaJ2IpKt(Ip+J2)
输出方程(假设测量 θ):
y=Cx,C=[100]
总转动惯量: Ip=m1l12+m2l22+J1
| 符号 | 单位 | 定义 |
|---|
| θ | rad | 摆杆角度 |
| φ | rad | 惯性轮角度 |
| J₁ | kg.m² | 包括电机定子的摆杆转动惯量 |
| J₂ | kg.m² | 包括电机转子的轮子转动惯量 |
| c₁ | N.m.s/rad | 摆杆摩擦系数 |
| c₂ | N.m.s/rad | 轮子摩擦系数 |
| m₁ | kg | 摆杆和定子的质量 |
| m₂ | kg | 轮子和转子的质量 |
| l₁ | m | 从原点到摆杆重心的长度 |
| l₂ | m | 从原点到轮子重心的长度 |
| Kb | V/(rad/s) | 反电动势常数 |
| Kt | N.m/A | 电机扭矩常数 |
| Ra | Ω | 电枢绕组电阻 |
给IWP的参数:
| Symbol | Value | Symbol | Value |
|---|
| J₁ | 0.01186 (kg·m²) | l₁ | 0.1053 (m) |
| J₂ | 0.0005711 (kg·m²) | l₂ | 0.14 (m) |
| c₁ | 0.04 (N·m·s/rad) | K_b | 0.0987 (V/(rad/s)) |
| c₂ | 0.0001 (N·m·s/rad) | K_t | 0.0987 (N·m/A) |
| m₁ | 0.826 (kg) | R_a | 1.5562 (Ω) |
| m₂ | 0.583 (kg) | | |
推状态空间方程- 不考虑瑞利耗散
θ¨φ¨=m1l12+m2l22+J1−KtRaVm−Kbφ˙+(m1l1+m2l2)gθ=J2(m1l12+m2l22+J1)KtRaVm−Kbφ˙(m1l12+m2l22+J1+J2)−J2(m1l1+m2l2)gθ
状态方程(平衡点 θ≈0)
在平衡点附近线性化(sinθ≈θ),得到状态方程(描述系统动态):
x˙=Ax+BVm
得到:
A=0Ip(m1l1+m2l2)g0−Ip(m1l1+m2l2)g100000000IpRaKtKb1J2Ip−KtKbRaIp+J2,B=0−RaIpKt0RaJ2IpKt(Ip+J2)
总转动惯量: Ip=m1l12+m2l22+J1
5. 最终状态方程
最终状态空间方程
x˙y=Ax+BVm,=Cx+DVm
其中:
C=[1000],D=0
| 符号 | 单位 | 定义 |
|---|
| θ | rad | 摆杆角度 |
| φ | rad | 惯性轮角度 |
| J₁ | kg.m² | 包括电机定子的摆杆转动惯量 |
| J₂ | kg.m² | 包括电机转子的轮子转动惯量 |
| c₁ | N.m.s/rad | 摆杆摩擦系数 |
| c₂ | N.m.s/rad | 轮子摩擦系数 |
| m₁ | kg | 摆杆和定子的质量 |
| m₂ | kg | 轮子和转子的质量 |
| l₁ | m | 从原点到摆杆重心的长度 |
| l₂ | m | 从原点到轮子重心的长度 |
| Kb | V/(rad/s) | 反电动势常数 |
| Kt | N.m/A | 电机扭矩常数 |
| Ra | Ω | 电枢绕组电阻 |
给IWP的参数:
| Symbol | Value | Symbol | Value |
|---|
| J₁ | 0.01186 (kg·m²) | l₁ | 0.1053 (m) |
| J₂ | 0.0005711 (kg·m²) | l₂ | 0.14 (m) |
| c₁ | 0.04 (N·m·s/rad) | K_b | 0.0987 (V/(rad/s)) |
| c₂ | 0.0001 (N·m·s/rad) | K_t | 0.0987 (N·m/A) |
| m₁ | 0.826 (kg) | R_a | 1.5562 (Ω) |
| m₂ | 0.583 (kg) | | |
推状态空间方程- 不考虑瑞利耗散 + 扭矩简化为tao
因为:
τ=Ktia=KtRaVm−Kbφ˙(公式4)
所以:
θ¨φ¨=m1l12+m2l22+J1−τ+(m1l1+m2l2)gθ=J2(m1l12+m2l22+J1)τ(m1l12+m2l22+J1+J2)−J2(m1l1+m2l2)gθ
状态方程(平衡点 θ≈0)
在平衡点附近线性化(sinθ≈θ),得到状态方程(描述系统动态):
x˙=Ax+Bτ
得到:
A=0Ip(m1l1+m2l2)g0−Ip(m1l1+m2l2)g100000000010,B=0−Ip10J2IpIp+J2
总转动惯量: Ip=m1l12+m2l22+J1
其中:
C=[1000],D=0
| 符号 | 单位 | 定义 |
|---|
| θ | rad | 摆杆角度 |
| φ | rad | 惯性轮角度 |
| J₁ | kg.m² | 包括电机定子的摆杆转动惯量 |
| J₂ | kg.m² | 包括电机转子的轮子转动惯量 |
| c₁ | N.m.s/rad | 摆杆摩擦系数 |
| c₂ | N.m.s/rad | 轮子摩擦系数 |
| m₁ | kg | 摆杆和定子的质量 |
| m₂ | kg | 轮子和转子的质量 |
| l₁ | m | 从原点到摆杆重心的长度 |
| l₂ | m | 从原点到轮子重心的长度 |
| Kb | V/(rad/s) | 反电动势常数 |
| Kt | N.m/A | 电机扭矩常数 |
| Ra | Ω | 电枢绕组电阻 |
给IWP的参数:
| Symbol | Value | Symbol | Value |
|---|
| J₁ | 0.01186 (kg·m²) | l₁ | 0.1053 (m) |
| J₂ | 0.0005711 (kg·m²) | l₂ | 0.14 (m) |
| c₁ | 0.04 (N·m·s/rad) | K_b | 0.0987 (V/(rad/s)) |
| c₂ | 0.0001 (N·m·s/rad) | K_t | 0.0987 (N·m/A) |
| m₁ | 0.826 (kg) | R_a | 1.5562 (Ω) |
| m₂ | 0.583 (kg) | | |

