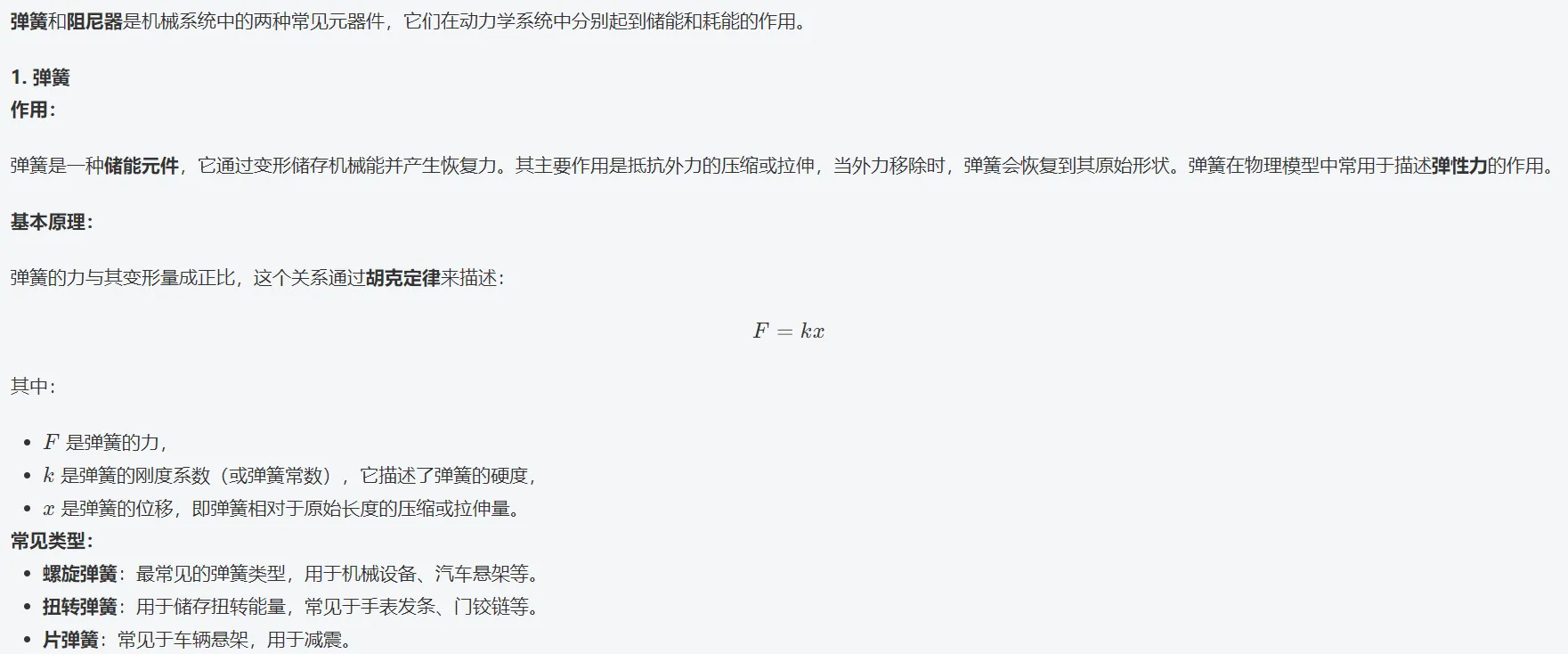
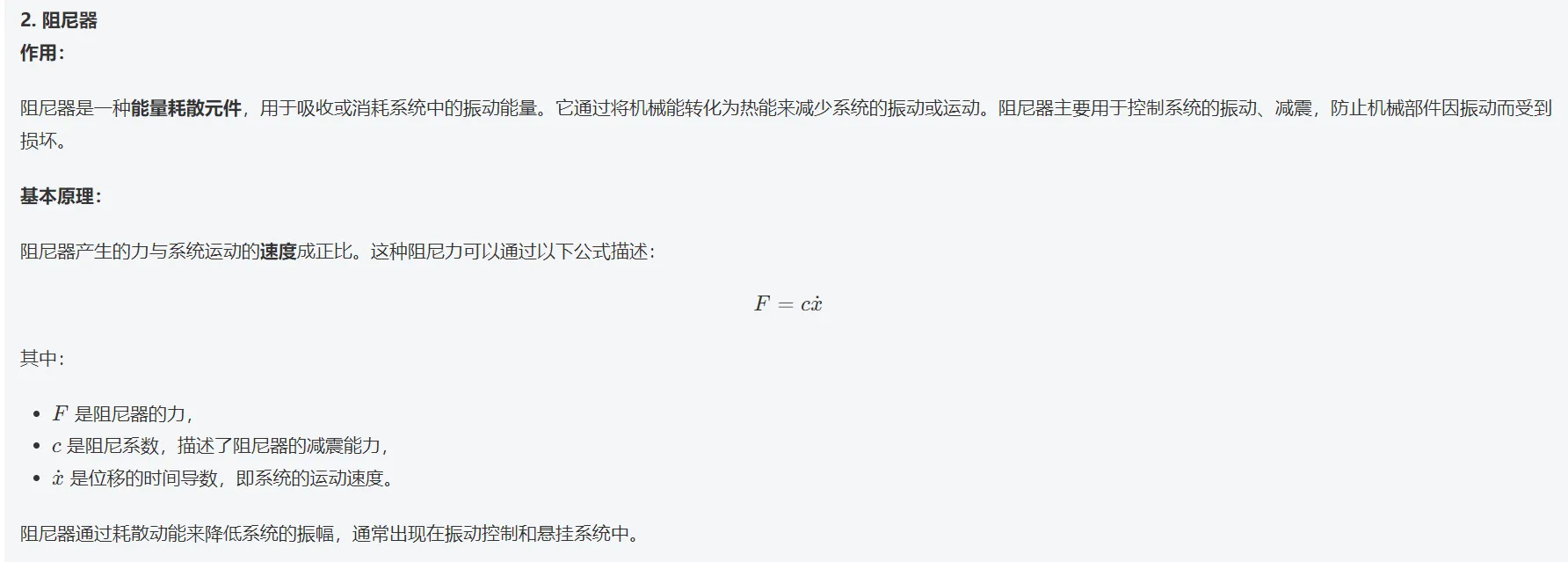
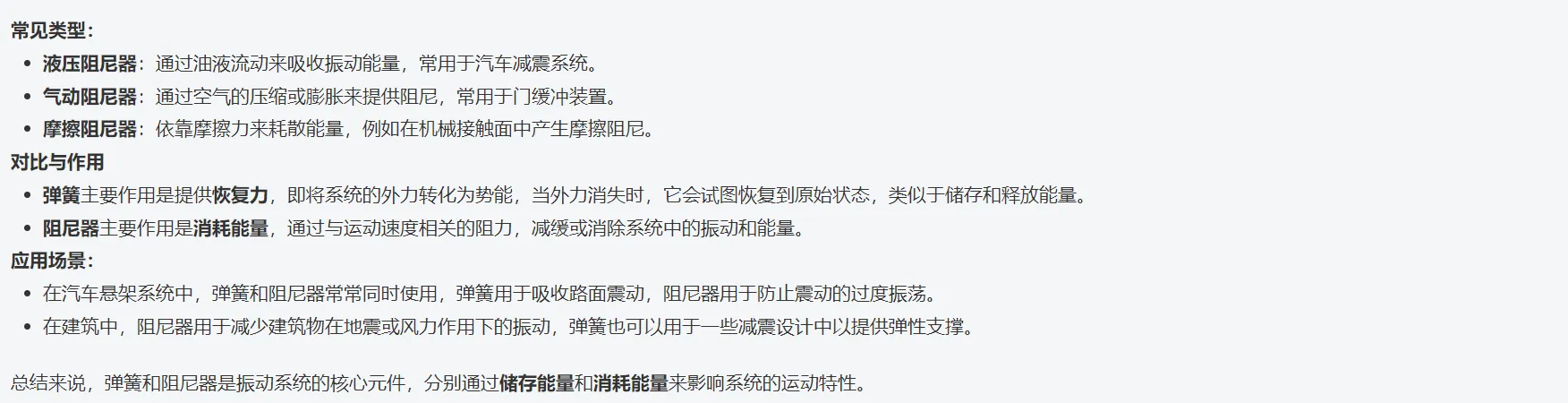
弹簧器与阻尼器
并联和串联
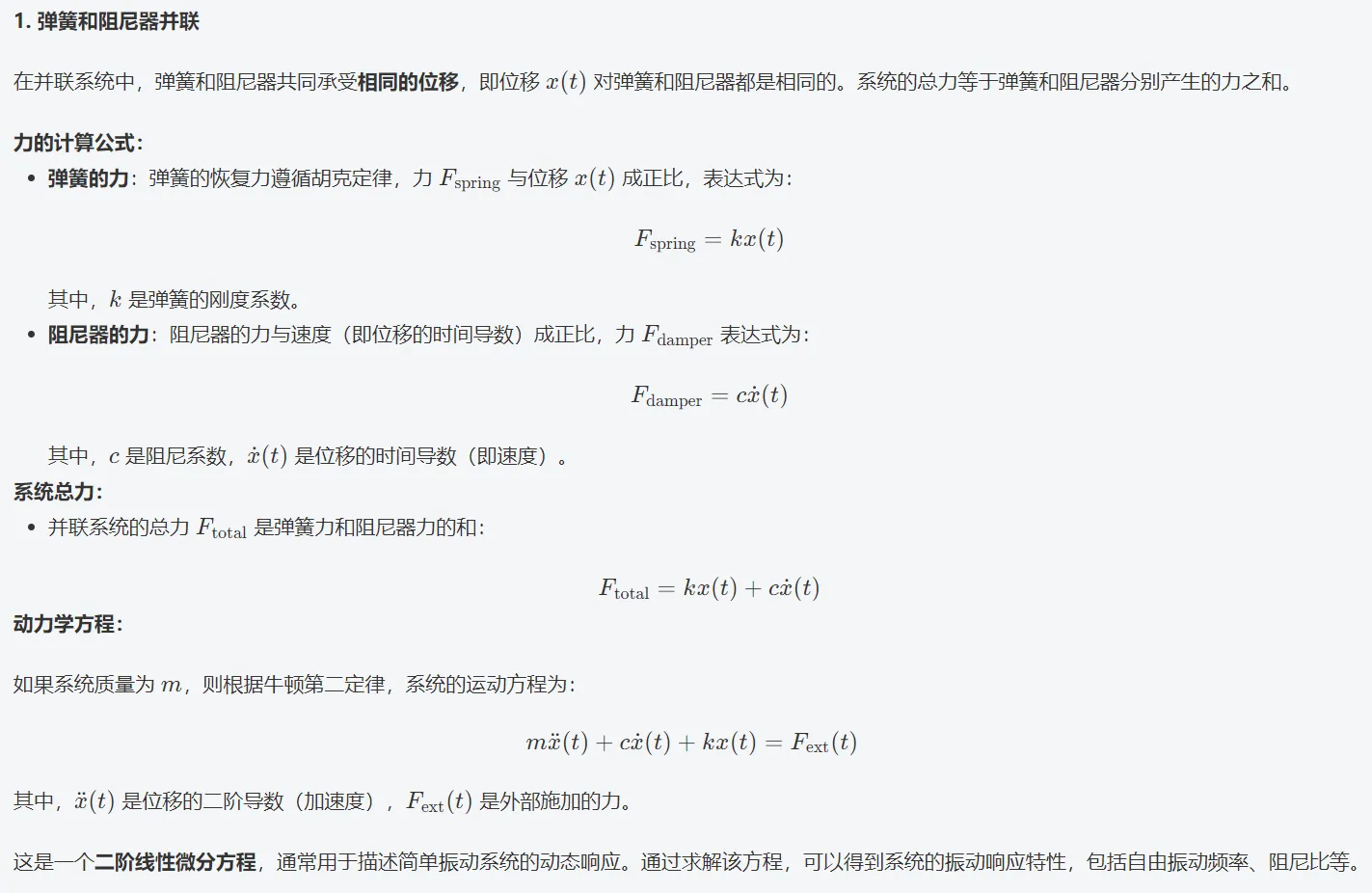
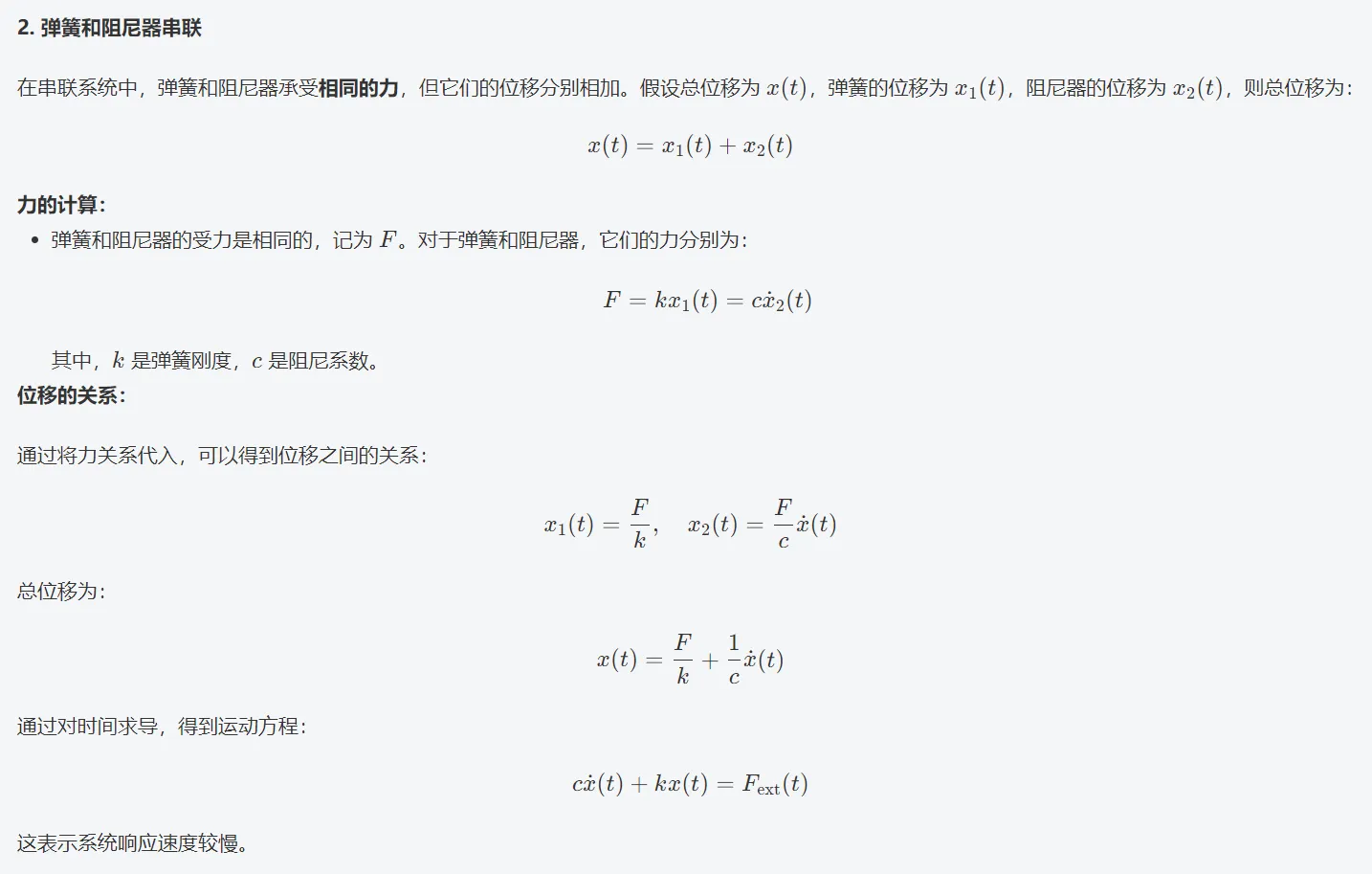
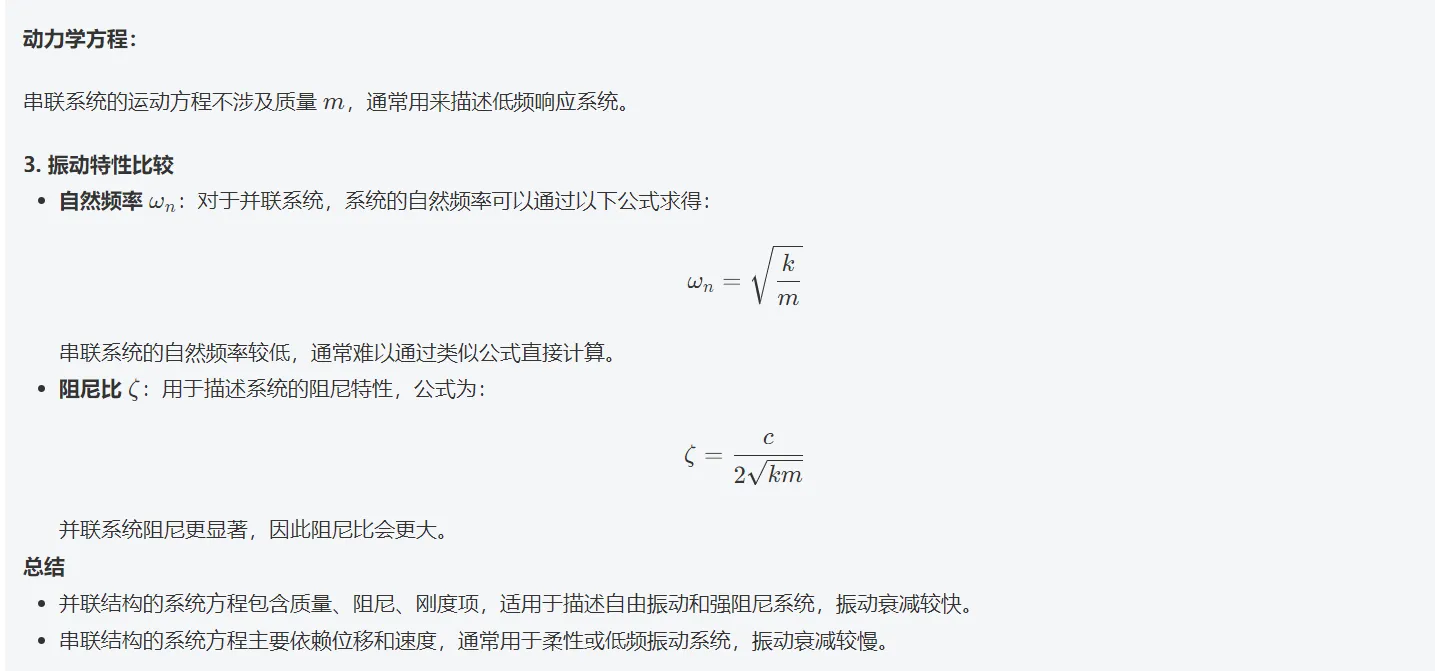
并联结构的系统方程包含质量、阻尼、刚度项,适用于描述自由振动和强阻尼系统,振动衰减较快。
串联结构的系统方程主要依赖位移和速度,通常用于柔性或低频振动系统,振动衰减较慢。
题目1
解答:
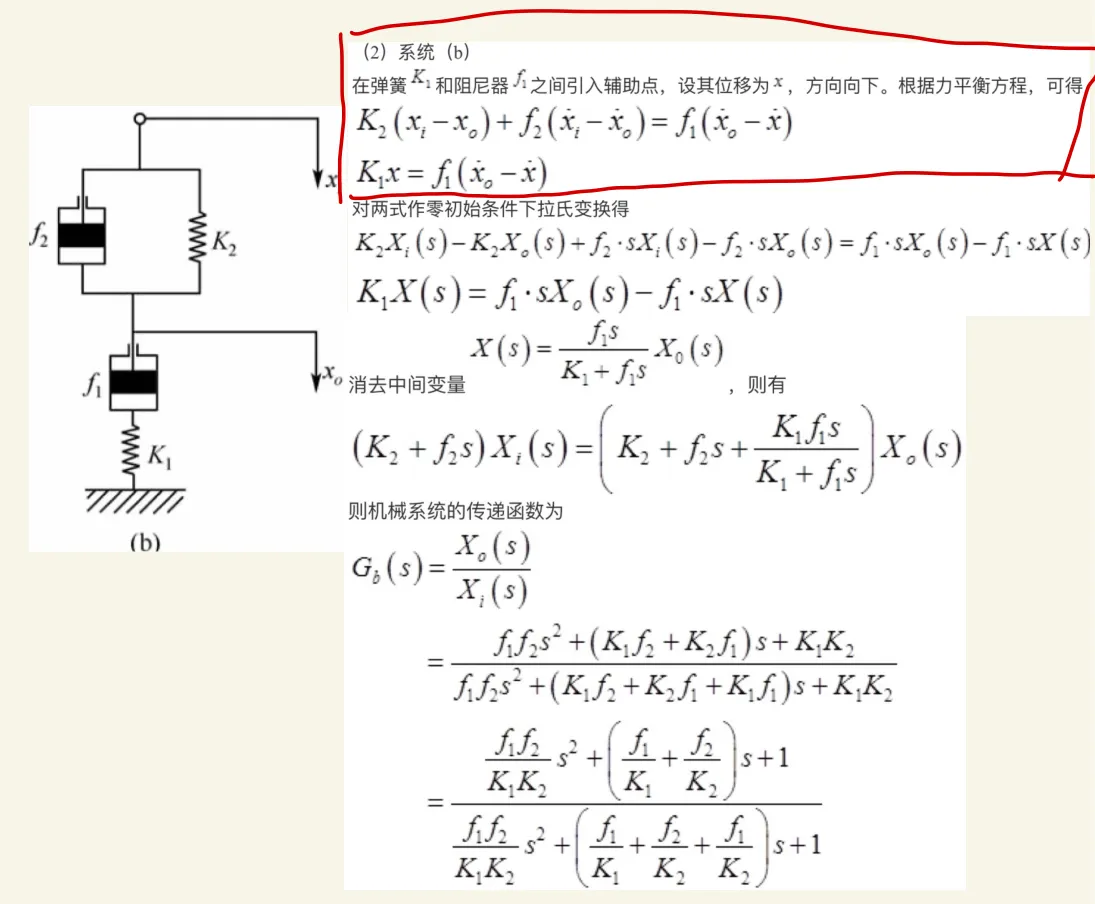
我们需要求解机械系统的传递函数 G(s)=Xi(s)Xo(s)。为此,按照以下步骤进行分析。
1. 引入辅助点并建立力平衡方程
在阻尼器 f1 和弹簧 K1 之间引入一个辅助点,设其位移为 x,方向向下。系统的结构如下:
- 点 1:位移为 xi
- 阻尼器 f2 和弹簧 K2 并联,连接点 1 和点 2
- 点 2:位移为 xo
- 阻尼器 f1,连接点 2 和辅助点
- 弹簧 K1,连接辅助点和地面
2. 建立力平衡方程
对于点 2,根据力平衡,可得:
-
从点 1 到点 2 的力:
- 弹簧 K2 的力:K2(xi−xo)
- 阻尼器 f2 的力:f2(xi−xo)˙
-
从点 2 到辅助点的力:
- 阻尼器 f1 的力:f1(xo−x)˙
因此,点 2 的力平衡方程为:
K2(xi−xo)+f2(xi−xo)˙=f1(xo−x)˙
对于辅助点,根据力平衡,可得:
- 弹簧 K1 的力:K1x
- 阻尼器 f1 的力:f1(xo−x)˙
由于弹簧 K1 和阻尼器 f1 连接在一起,力相等,因此有:
K1x=f1(xo−x)˙
3. 对方程进行拉普拉斯变换
假设初始条件为零,对上述两个方程进行拉普拉斯变换:
- 对第一个方程:
K2[Xi(s)−Xo(s)]+f2s[Xi(s)−Xo(s)]=f1s[Xo(s)−X(s)]
- 对第二个方程:
K1X(s)=f1s[Xo(s)−X(s)]
4. 解出 X(s) 与 Xo(s) 的关系
从第二个方程解出 X(s):
K1X(s)K1X(s)+f1sX(s)X(s)[K1+f1s]X(s)=f1s[Xo(s)−X(s)]=f1sXo(s)=f1sXo(s)=K1+f1sf1sXo(s)
5. 消除 X(s),建立 Xi(s) 和 Xo(s) 的关系
将 X(s) 代入第一个方程:
K2[Xi(s)−Xo(s)]+f2s[Xi(s)−Xo(s)]=f1s[Xo(s)−K1+f1sf1sXo(s)]
简化右侧:
f1s[Xo(s)−K1+f1sf1sXo(s)]=f1sXo(s)[1−K1+f1sf1s]=f1sXo(s)(K1+f1sK1)=K1+f1sK1f1sXo(s)
因此,方程变为:
(K2+f2s)[Xi(s)−Xo(s)]=K1+f1sK1f1sXo(s)
整理得:
(K2+f2s)Xi(s)=(K2+f2s+K1+f1sK1f1s)Xo(s)
6. 求解传递函数 G(s)
传递函数为:
G(s)=Xi(s)Xo(s)=K2+f2s+K1+f1sK1f1sK2+f2s
7. 化简传递函数
首先,将分母中的分式合并:
分母=K2+f2s+K1+f1sK1f1s=K1+f1s(K2+f2s)(K1+f1s)+K1f1s=K1+f1sK2K1+K2f1s+f2sK1+f2f1s2+K1f1s
将分子也乘以 K1+f1s:
分子=(K2+f2s)(K1+f1s)
因此,传递函数变为:
G(s)=(K2+f2s)(K1+f1s)+K1f1s(K2+f2s)(K1+f1s)
8. 展开并整理
展开分子:
分子=K2K1+K2f1s+f2sK1+f2f1s2
展开分母:
分母=K2K1+K2f1s+f2sK1+f2f1s2+K1f1s=K2K1+(K2f1+f2K1+K1f1)s+f2f1s2
9. 写成标准形式
将分子和分母写成关于 s 的多项式:
分子分母=f1f2s2+(K1f2+K2f1)s+K1K2=f1f2s2+(K1f2+K2f1+K1f1)s+K1K2
10. 归一化处理
为了进一步简化,我们将分子和分母同时除以 K1K2:
G(s)=K1K2f1f2s2+(K1f1+K2f2+K2f1)s+1K1K2f1f2s2+(K1f1+K2f2)s+1
11. 最终的传递函数
得到机械系统的传递函数:
G(s)=K1K2f1f2s2+(K1f1+K2f2+K2f1)s+1K1K2f1f2s2+(K1f1+K2f2)s+1
总结
通过引入辅助点并建立力平衡方程,利用拉普拉斯变换,将位移 X(s) 表示为 Xo(s) 的函数,进而消除 X(s),建立了 Xi(s) 和 Xo(s) 之间的关系。经过代数化简,得到了机械系统的传递函数 G(s)。
题目1的问题
解答:
您的问题主要是关于如何确定力的方向,以及为什么力的表达式是那样的。让我一步步解释。
1. 力的方向如何确定?
在机械系统中,力的方向取决于元件的特性和位移(或速度)的方向。一般来说:
2. 为什么弹簧 K2 的力是 K2(xi−xo)?
-
位移定义:设定向下为正方向。xi 是点 1 的位移,xo 是点 2 的位移。
-
弹簧的伸缩量:弹簧 K2 的伸缩量为 Δx=xo−xi。因为一端在点 1(位移 xi),另一端在点 2(位移 xo)。
-
弹簧力的计算:弹簧力为 F=K2Δx=K2(xo−xi)。但是,由于力的方向与伸缩量相反,所以作用在点 2 上的弹簧力为:
FK2=−K2(xo−xi)=K2(xi−xo)
这里,负号表示力的方向与 xo−xi 相反。
3. 为什么阻尼器 f2 的力是 f2(xi−xo)˙?
-
相对速度:阻尼器 f2 的两端位移为 xi 和 xo,因此相对速度为 Δx˙=x˙o−x˙i。
-
阻尼力的计算:阻尼力为 F=f2Δx˙=f2(x˙o−x˙i)。同样,力的方向与相对速度相反,所以作用在点 2 上的阻尼力为:
Ff2=−f2(x˙o−x˙i)=f2(x˙i−x˙o)
4. 为什么点 2 可以进行力平衡?
在力学中,如果我们考虑的是质量为零或忽略不计的节点(即点 2 没有质量或惯性),那么在该点上的所有力的和应该为零(静力平衡),或者等于质量乘以加速度(动力平衡)。在这个问题中,我们假设点 2 的质量可以忽略,因此可以进行力平衡。
5. 点 2 的力平衡方程如何建立?
作用在点 2 上的力:
-
来自弹簧 K2 的力:FK2=K2(xi−xo)
-
来自阻尼器 f2 的力:Ff2=f2(x˙i−x˙o)
-
来自阻尼器 f1 的力:阻尼器 f1 连接点 2 和辅助点(位移为 x),相对速度为 x˙o−x˙。阻尼器的力为:
Ff1=f1(x˙o−x˙)
力的方向是与相对速度相反,但在这里,我们将力视为作用在点 2 上的力,所以直接使用这个表达式。
力平衡方程:
在点 2 上,所有作用在其上的力的代数和应为零:
FK2+Ff2−Ff1=0
这里,Ff1 是作用在点 2 上,由于阻尼器 f1 连接点 2 和辅助点,力的方向与相对速度一致(因为阻尼力总是阻碍相对运动)。
因此,力平衡方程为:
K2(xi−xo)+f2(x˙i−x˙o)=f1(x˙o−x˙)
6. 为什么力的方向如此选择?
-
弹簧力:如果 xo>xi,即点 2 向下移动多于点 1,弹簧被拉伸,弹簧力试图将点 2 拉回,作用在点 2 上的力向上,为负方向,因此 FK2=K2(xi−xo)。
-
阻尼力:同理,若 x˙o>x˙i,即点 2 的速度大于点 1,阻尼器力试图阻碍这种相对运动,作用在点 2 上的力为向上,即 Ff2=f2(x˙i−x˙o)。
-
阻尼器 f1 的力:阻尼器连接点 2 和辅助点,若 x˙o>x˙,阻尼器力试图阻碍点 2 相对于辅助点的向下运动,作用在点 2 上的力为向上,所以力为 Ff1=f1(x˙o−x˙)。
7. 总结
因此,作用在点 2 上的力平衡方程就是将所有作用在点 2 上的力求和,并设其代数和为零:
作用在点 2 上的上行力(正)=作用在点 2 上的下行力(负)
也就是说:
K2(xi−xo)+f2(x˙i−x˙o)=f1(x˙o−x˙)
8. 关于辅助点的力平衡
对于辅助点(位移为 x),同样进行力平衡:
力平衡方程为:
f1(x˙o−x˙)=K1x
9. 总体理解
-
点 2 的力平衡:考虑所有连接到点 2 的元件(弹簧 K2、阻尼器 f2、阻尼器 f1)产生的力。
-
力的方向:根据元件的特性(弹簧力与位移差成正比,方向相反;阻尼力与速度差成正比,方向相反),确定作用在点 2 上的力。
-
力平衡方程:将作用在点 2 上的所有力相加,设代数和为零,得到力平衡方程。
10. 进一步说明
11. 最后的力平衡方程
综上所述,点 2 的力平衡方程为:
K2(xi−xo)+f2(x˙i−x˙o)=f1(x˙o−x˙)
这个方程表达了作用在点 2 上的所有力的平衡关系。
希望这能帮助您理解力的方向和力平衡方程的建立。

