【WSL】【Opencv】【MNN】【C++】在windows中使用WSL开发C++程序的环境搭建 freetype支持
目录
基本环境
(1)安装WSL;
(2)安装cmake:
sh展开代码wget https://github.com/Kitware/CMake/releases/download/v3.20.0/cmake-3.20.0-linux-x86_64.tar.gz
tar -xzvf cmake-3.20.0-linux-x86_64.tar.gz
sudo ln -sf $(pwd)/cmake-3.20.0-linux-x86_64/bin/* /usr/bin/
(3)安装gcc++:
sh展开代码# 如果 Ubuntu 版本 < 18.04,需要加入仓库
sudo add-apt-repository ppa:ubuntu-toolchain-r/test
sudo apt-get update
sudo apt-get install gcc
sudo apt-get install g++
(4)安装GDB:
sh展开代码sudo apt install gdb
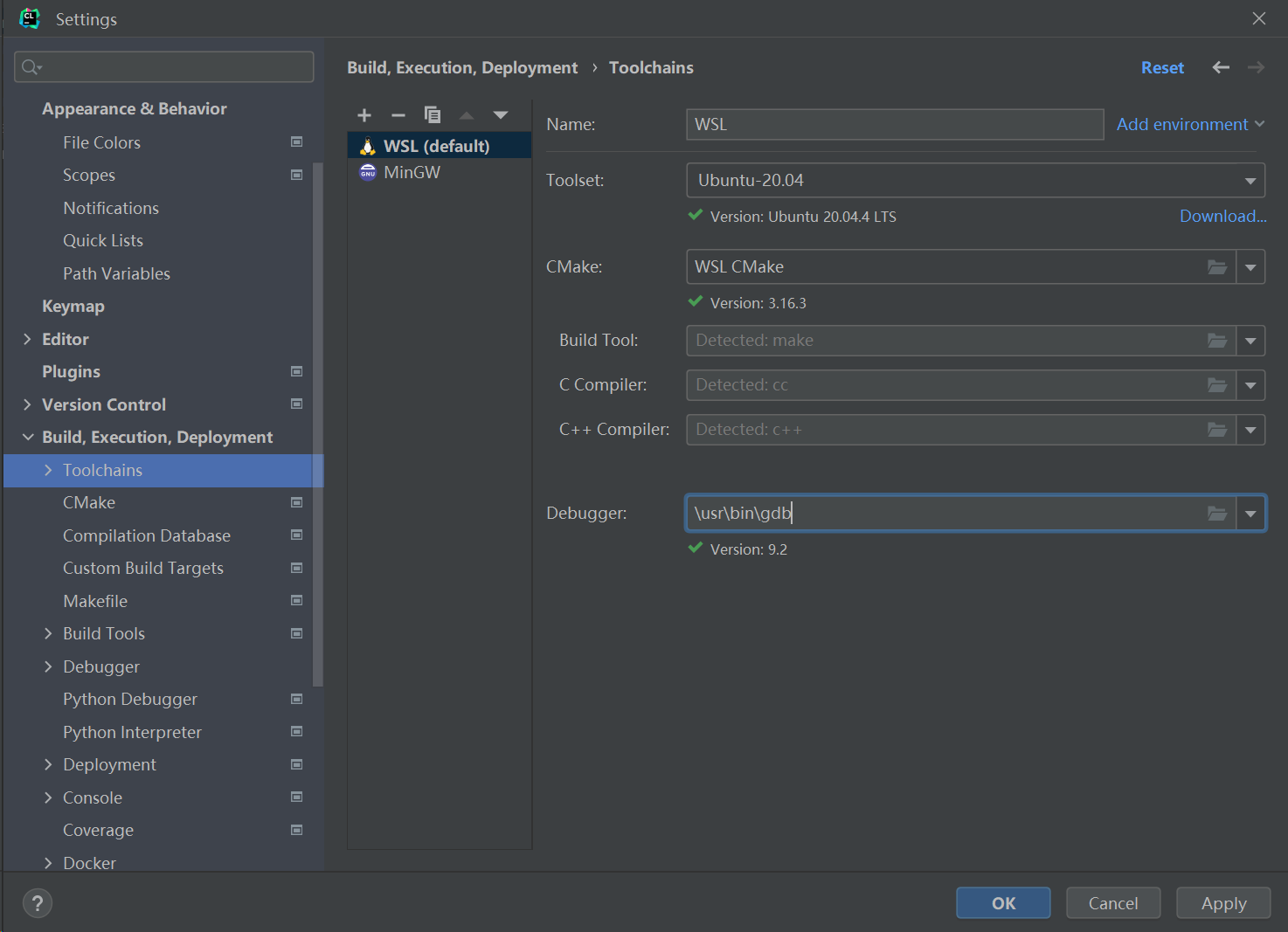
(5)clion建立空工程后选择toolchains如下:
Ubuntu安装Opencv
从源码安装opencv-4.x
依赖:
sh展开代码sudo apt install build-essential cmake git pkg-config libgtk-3-dev \ libavcodec-dev libavformat-dev libswscale-dev libv4l-dev \ libxvidcore-dev libx264-dev libjpeg-dev libpng-dev libtiff-dev \ gfortran openexr libatlas-base-dev python3-dev python3-numpy \ libtbb2 libtbb-dev libdc1394-22-dev libopenexr-dev \ libgstreamer-plugins-base1.0-dev libgstreamer1.0-dev
去github下载最新包:https://github.com/opencv/opencv.git
或者去官网下载 一个版本:https://opencv.org/releases/
sh展开代码cd opencv-4.x
mkdir -p build && cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE ..
make -j8
sudo make install
从源码安装opencv-3.x
方法同opencv-4.x,但安装路径有区别,得注意。
直接pkg包安装
不想编译也ok,直接:
sh展开代码sudo apt-get install -y libopencv-dev
freetype支持
https://cloud.tencent.com/developer/article/1353734
CLion工程cmake文件写法
c展开代码# 声明要求的 cmake 最低版本
cmake_minimum_required( VERSION 3.8 )
# 声明一个 cmake 工程
project( cpptest )
# 设置编译模式
set( CMAKE_BUILD_TYPE "Debug" )
#set(OpenCV_DIR "/usr/local/share/OpenCV")
set(OpenCV_DIR "/usr/local/share/opencv4") # 给一个安装路径
find_package( OpenCV REQUIRED ) # 找包
#添加OpenCV头文件
include_directories(${OpenCV_INCLUDE_DIRS})
message(STATUS "OpenCV_INCLUDE_DIRS: ${OpenCV_INCLUDE_DIRS}")
message(STATUS "OpenCV_LIBS: ${OpenCV_LIBS}")
# 添加一个可执行程序
# 语法:add_executable( 程序名 源代码文件 )
add_executable( cpptest main.cpp)
# 将库文件链接到可执行程序上
target_link_libraries( cpptest ${OpenCV_LIBS})
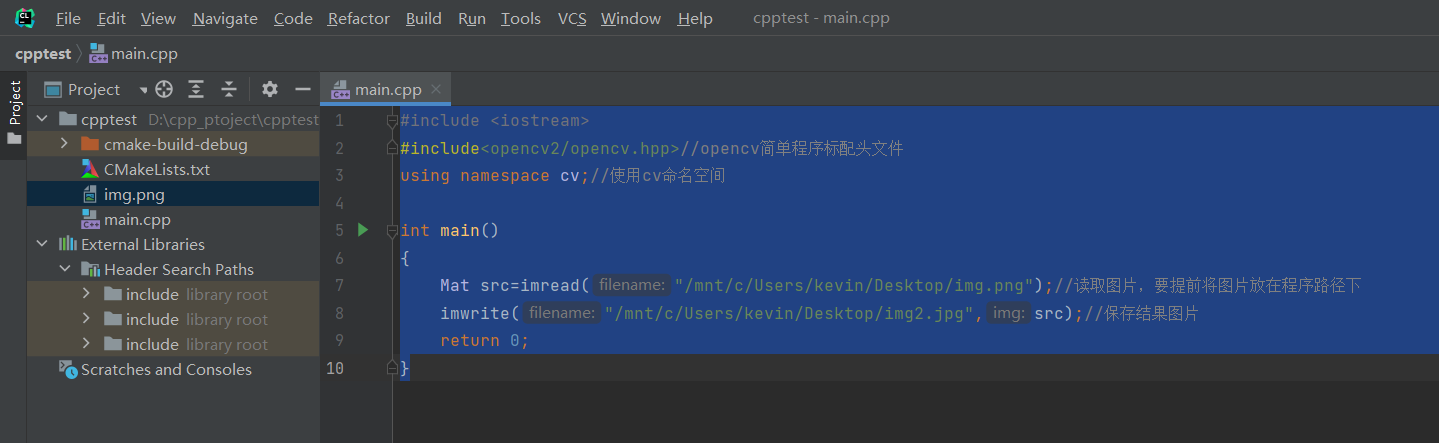
Opencv demo
c++展开代码#include <iostream>
#include<opencv2/opencv.hpp>//opencv简单程序标配头文件
using namespace cv;//使用cv命名空间
int main()
{
Mat src=imread("/mnt/c/Users/kevin/Desktop/img.png");//读取图片,要提前将图片放在程序路径下
imwrite("/mnt/c/Users/kevin/Desktop/img2.jpg",src);//保存结果图片
return 0;
}
MNN
mnn文档
https://mnn-docs.readthedocs.io/en/latest/compile/engine.html
在Ubuntu编译MNN
sh展开代码sudo apt install protobuf-compiler
# 下载mnn源码后:
cd schema && ./generate.sh
mkdir -p build && cd build
cmake -DMNN_BUILD_CONVERTER=ON -DCMAKE_BUILD_TYPE=Release ..
make -j8
sudo make install
安装成功:
sh展开代码[100%] Built target OnnxClip
Install the project...
-- Install configuration: "Release"
-- Installing: /usr/local/include/MNN/MNNDefine.h
-- Installing: /usr/local/include/MNN/Interpreter.hpp
-- Installing: /usr/local/include/MNN/HalideRuntime.h
-- Installing: /usr/local/include/MNN/Tensor.hpp
-- Installing: /usr/local/include/MNN/ErrorCode.hpp
-- Installing: /usr/local/include/MNN/ImageProcess.hpp
-- Installing: /usr/local/include/MNN/Matrix.h
-- Installing: /usr/local/include/MNN/Rect.h
-- Installing: /usr/local/include/MNN/MNNForwardType.h
-- Installing: /usr/local/include/MNN/AutoTime.hpp
-- Installing: /usr/local/include/MNN/MNNSharedContext.h
-- Installing: /usr/local/include/MNN/expr/Expr.hpp
-- Installing: /usr/local/include/MNN/expr/ExprCreator.hpp
-- Installing: /usr/local/include/MNN/expr/MathOp.hpp
-- Installing: /usr/local/include/MNN/expr/NeuralNetWorkOp.hpp
-- Installing: /usr/local/include/MNN/expr/Optimizer.hpp
-- Installing: /usr/local/include/MNN/expr/Executor.hpp
-- Installing: /usr/local/include/MNN/expr/Module.hpp
-- Up-to-date: /usr/local/include/MNN/expr/NeuralNetWorkOp.hpp
-- Installing: /usr/local/include/MNN/expr/ExecutorScope.hpp
-- Installing: /usr/local/include/MNN/expr/Scope.hpp
-- Installing: /usr/local/lib/libMNN.so
-- Installing: /usr/local/lib/libMNN_Express.so
-- Set runtime path of "/usr/local/lib/libMNN_Express.so" to ""
CLion中使用
CmakeList.txt:
c展开代码# 声明要求的 cmake 最低版本
cmake_minimum_required( VERSION 3.8 )
# 声明一个 cmake 工程
project( cpptest )
# 设置编译模式
set( CMAKE_BUILD_TYPE "Debug" )
set(OpenCV_DIR "/usr/local/share/opencv4") # 给一个安装路径
find_package( OpenCV REQUIRED ) # 找包
if (OpenCV_FOUND)
# If the package has been found, several variables will
# be set, you can find the full list with descriptions
# in the OpenCVConfig.cmake file.
# Print some message showing some of them
message(STATUS "OpenCV library status:")
message(STATUS " version: ${OpenCV_VERSION}")
message(STATUS " include path: ${OpenCV_INCLUDE_DIRS}")
else ()
message(FATAL_ERROR "Could not locate OpenCV")
endif()
#添加OpenCV头文件
include_directories(${OpenCV_INCLUDE_DIRS})
set(lib_DIR /usr/local/lib)
include_directories(/usr/local/include)
add_library(MNN SHARED IMPORTED)
set_target_properties(
MNN
PROPERTIES IMPORTED_LOCATION
${lib_DIR}/libMNN.so
)
#include 是头文件 src是c代码
include_directories( ${CMAKE_SOURCE_DIR}/include )
message(STATUS "CMAKE_SOURCE_DIR : ${CMAKE_SOURCE_DIR}")
aux_source_directory( ${CMAKE_SOURCE_DIR}/src DIR_SRCS)
message(STATUS "DIR_SRCS: ${DIR_SRCS}")
# 添加一个可执行程序
add_executable( cpptest main.cpp ${DIR_SRCS})
# 将库文件链接到可执行程序上
target_link_libraries( cpptest MNN ${OpenCV_LIBS} )
main.cpp:
cpp展开代码#include <iostream>
#include <string>
#include <MNN/Interpreter.hpp>
#include <opencv2/opencv.hpp>
#include <iostream>
#include "Yolo.h"
using namespace MNN;
int main() {
const char *model_name = "/mnt/d/cpp_ptoject/cpptest/checkpoints/yolov7-tiny416.mnn";
std::shared_ptr<Interpreter> net(Interpreter::createFromFile(model_name));
ScheduleConfig config;
config.type = MNN_FORWARD_AUTO;
Session *pSession = net->createSession(config);
Tensor *ptensorInput = net->getSessionInput(pSession, NULL);
std::vector<int> vctInputDims = ptensorInput->shape();
printf("输入Tensor的维度为: ");
for (size_t i = 0; i < vctInputDims.size(); ++i) {
printf("%d ", vctInputDims[i]);
}
printf("\n");
// opencv 读取数据,resize操作,减均值, 除方差,并且转成nchw
cv::Mat matImg = cv::imread("/mnt/d/cpp_ptoject/cpptest/doc/bus.jpg", cv::IMREAD_COLOR);
assert(matImg.data != NULL);
cv::Mat matFloatImage;
int MODEL_INPUT_HEIGHT = 416;
int MODEL_INPUT_WIDTH = 416;
float r;
int dw, dh;
letterbox(matImg,
matFloatImage,
MODEL_INPUT_WIDTH,
MODEL_INPUT_HEIGHT,
cv::Scalar(114, 114, 114),
false,
true,
32, r, dw, dh);
cv::cvtColor(matFloatImage, matFloatImage, cv::COLOR_BGR2RGB);
matFloatImage.convertTo(matFloatImage, CV_32FC3);
cv::Mat matStd(MODEL_INPUT_HEIGHT, MODEL_INPUT_WIDTH, CV_32FC3, cv::Scalar(255.0f, 255.0f, 255.0f));
cv::Mat matMean(MODEL_INPUT_HEIGHT, MODEL_INPUT_WIDTH, CV_32FC3, cv::Scalar(0.0f, 0.0f, 0.0f)); // 均值
cv::Mat matNormImage = (matFloatImage - matMean) / matStd;
std::vector<std::vector<cv::Mat>> nChannels;
std::vector<cv::Mat> rgbChannels(3);
cv::split(matNormImage, rgbChannels);
nChannels.push_back(rgbChannels); // NHWC 转NCHW
void *pvData = malloc(1 * 3 * MODEL_INPUT_HEIGHT * MODEL_INPUT_WIDTH * sizeof(float));
int nPlaneSize = MODEL_INPUT_HEIGHT * MODEL_INPUT_WIDTH;
for (int c = 0; c < 3; ++c) {
cv::Mat matPlane = nChannels[0][c];
memcpy((float *) (pvData) + c * nPlaneSize, \
matPlane.data, nPlaneSize * sizeof(float));
}
// 将数据拷贝到Tensor中
auto nchwTensor = new Tensor(ptensorInput, Tensor::CAFFE);
::memcpy(nchwTensor->host<float>(), pvData, nPlaneSize * 3 * sizeof(float));
ptensorInput->copyFromHostTensor(nchwTensor);
delete nchwTensor;
// 获取输出Tensor
Tensor *pTensorOutput = net->getSessionOutput(pSession, NULL);
// 执行推理
net->runSession(pSession);
// 获取输出维度类型
auto dimType = pTensorOutput->getDimensionType();
if (pTensorOutput->getType().code != halide_type_float) {
dimType = Tensor::CAFFE;
}
// 创建输出tensor
std::shared_ptr<Tensor> outputUser(new Tensor(pTensorOutput, dimType));
MNN_PRINT("output size:%d\n", outputUser->elementSize());
// 拷贝出去
pTensorOutput->copyToHostTensor(outputUser.get());
auto type = outputUser->getType();
auto size = outputUser->elementSize();
//100行*7列
std::vector<std::vector<float>> tempValues;
if (type.code == halide_type_float) {
auto values = outputUser->host<float>();
for (int i = 0; i < size; i += 7) {
std::vector<float> temp;
if (values[i + 6] < 0.1) {
break;
}
for (int j = 0; j < 7; j++) {
temp.push_back(values[i + j]);
}
tempValues.push_back(temp);
}
}
drawResultImage(matImg, tempValues, r, dw, dh);
cv::imwrite("/mnt/d/cpp_ptoject/cpptest/doc/bus_out.jpg", matImg);
// 释放我们创建的数据内存,这个不是tensor里的
if (NULL != pvData) {
free(pvData);
pvData = NULL;
}
std::cout << "finish " << std::endl;
return 0;
}
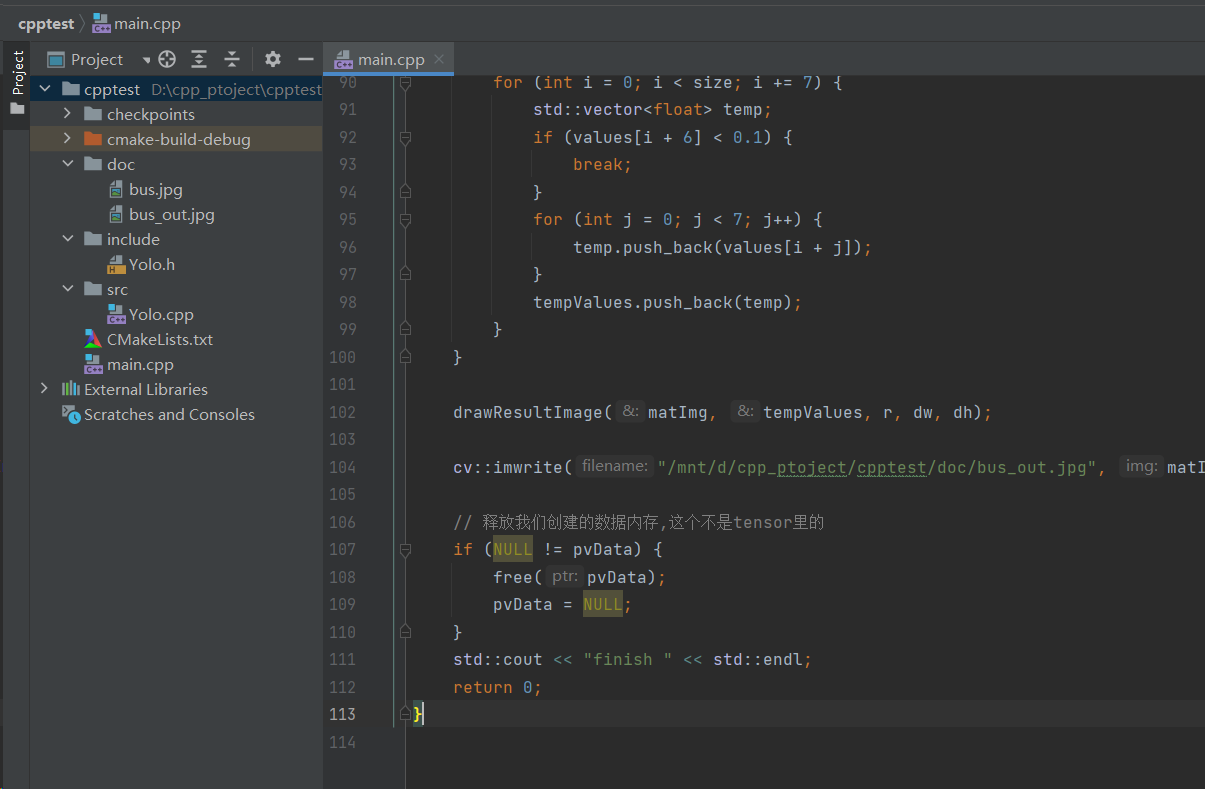
项目样子:
如果对你有用的话,可以打赏哦
打赏


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!
目录