【几何数学】【Python】【C++】判断两条线段是否相交,若相交则求出交点坐标
目录
判断线段是否相交的办法(使用了向量叉积的方法):
c展开代码首先,通过给定的线段端点坐标p1、p2、p3和p4构建了四个向量v1、v2、v3和v4:
v1表示从p1指向p2的向量,其分量为[p2[0] - p1[0], p2[1] - p1[1]]。
v2表示从p3指向p4的向量,其分量为[p4[0] - p3[0], p4[1] - p3[1]]。
v3表示从p1指向p3的向量,其分量为[p3[0] - p1[0], p3[1] - p1[1]]。
v4表示从p1指向p4的向量,其分量为[p4[0] - p1[0], p4[1] - p1[1]]。
接下来,计算了两个叉积cross1和cross2:
cross1表示v1和v3的叉积,计算公式为v1[0] * v3[1] - v1[1] * v3[0]。
cross2表示v1和v4的叉积,计算公式为v1[0] * v4[1] - v1[1] * v4[0]。
最后,根据两个叉积的乘积进行判断:
如果cross1和cross2的乘积小于等于0,意味着v1和v3位于不同的半平面或者其中一个线段的某个端点在另一个线段上,这时可以判断两条线段相交。
如果cross1和cross2的乘积大于0,意味着v1和v3位于同一侧或者两个线段没有交点,这时可以判断两条线段不相交。
根据以上逻辑,如果条件满足,则返回True表示线段相交,否则返回False表示线段不相交。
Python代码实现:
python展开代码class point(): # 定义类
def __init__(self, x, y):
self.x = x
self.y = y
def cross(p1, p2, p3): # 跨立实验
x1 = p2.x - p1.x
y1 = p2.y - p1.y
x2 = p3.x - p1.x
y2 = p3.y - p1.y
return x1 * y2 - x2 * y1
def has_intersect(p1, p2, p3, p4): # 判断两线段是否相交
# 快速排斥,以l1、l2为对角线的矩形必相交,否则两线段不相交
if (max(p1.x, p2.x) >= min(p3.x, p4.x) # 矩形1最右端大于矩形2最左端
and max(p3.x, p4.x) >= min(p1.x, p2.x) # 矩形2最右端大于矩形最左端
and max(p1.y, p2.y) >= min(p3.y, p4.y) # 矩形1最高端大于矩形最低端
and max(p3.y, p4.y) >= min(p1.y, p2.y)): # 矩形2最高端大于矩形最低端
# 若通过快速排斥则进行跨立实验
if (cross(p1, p2, p3) * cross(p1, p2, p4) <= 0
and cross(p3, p4, p1) * cross(p3, p4, p2) <= 0):
D = True
else:
D = False
else:
D = False
return D
def are_lines_intersect(p1, p2, p3, p4):
p1 = point(p1[0], p1[1])
p2 = point(p2[0], p2[1])
p3 = point(p3[0], p3[1])
p4 = point(p4[0], p4[1])
if has_intersect(p1, p2, p3, p4):
return True
else:
return False
def compute_intersection(p1, p2, p3, p4):
if p1[0] == p2[0]: # p1p2为垂直线
x = p1[0]
slope2 = (p4[1] - p3[1]) / (p4[0] - p3[0])
intercept2 = p3[1] - slope2 * p3[0]
y = slope2 * x + intercept2
elif p3[0] == p4[0]: # p3p4为垂直线
x = p3[0]
slope1 = (p2[1] - p1[1]) / (p2[0] - p1[0])
intercept1 = p1[1] - slope1 * p1[0]
y = slope1 * x + intercept1
else:
slope1 = (p2[1] - p1[1]) / (p2[0] - p1[0])
slope2 = (p4[1] - p3[1]) / (p4[0] - p3[0])
intercept1 = p1[1] - slope1 * p1[0]
intercept2 = p3[1] - slope2 * p3[0]
if slope1 == slope2:
# 斜率相等的时候,如果线段重合,交点是无数个,这里返回断点表达此意
if p1[0] <= p3[0] <= p2[0]:
return p3
if p1[0] <= p4[0] <= p2[0]:
return p4
else:
x = (intercept2 - intercept1) / (slope1 - slope2)
y = slope1 * x + intercept1
return [x, y]
if __name__ == '__main__':
p1 = [0, 5]
p2 = [10, 5]
p3 = [0, 10]
p4 = [10, 10]
# p1 p2 是一条线段
# p3 p4 是另一条线段
# 判断是否相交,相交且求交点
if are_lines_intersect(p1, p2, p3, p4):
print(compute_intersection(p1, p2, p3, p4))
x, y = compute_intersection(p1, p2, p3, p4)
else:
print("No intersection")
# 画图
import matplotlib.pyplot as plt
# 样式是波浪线
plt.plot([p1[0], p2[0]], [p1[1], p2[1]], color='r')
# 样式是点线
plt.plot([p3[0], p4[0]], [p3[1], p4[1]], color='b', linewidth=4, linestyle=':')
# 加注释
plt.annotate('p1', xy=(p1[0], p1[1]), xytext=(p1[0] + 10, p1[1] + 10))
plt.annotate('p2', xy=(p2[0], p2[1]), xytext=(p2[0] + 10, p2[1] + 10))
plt.annotate('p3', xy=(p3[0], p3[1]), xytext=(p3[0] + 10, p3[1] + 10))
plt.annotate('p4', xy=(p4[0], p4[1]), xytext=(p4[0] + 10, p4[1] + 10))
try:
# 绘制交点
plt.scatter(x, y, color='g', marker='o')
# 给交点加注释
plt.annotate('intersection', xy=(x, y), xytext=(x, y),
arrowprops=dict(facecolor='g', shrink=0.05))
except:
pass
# 坐标轴等距
plt.axis('equal')
plt.show()
绘制的图:
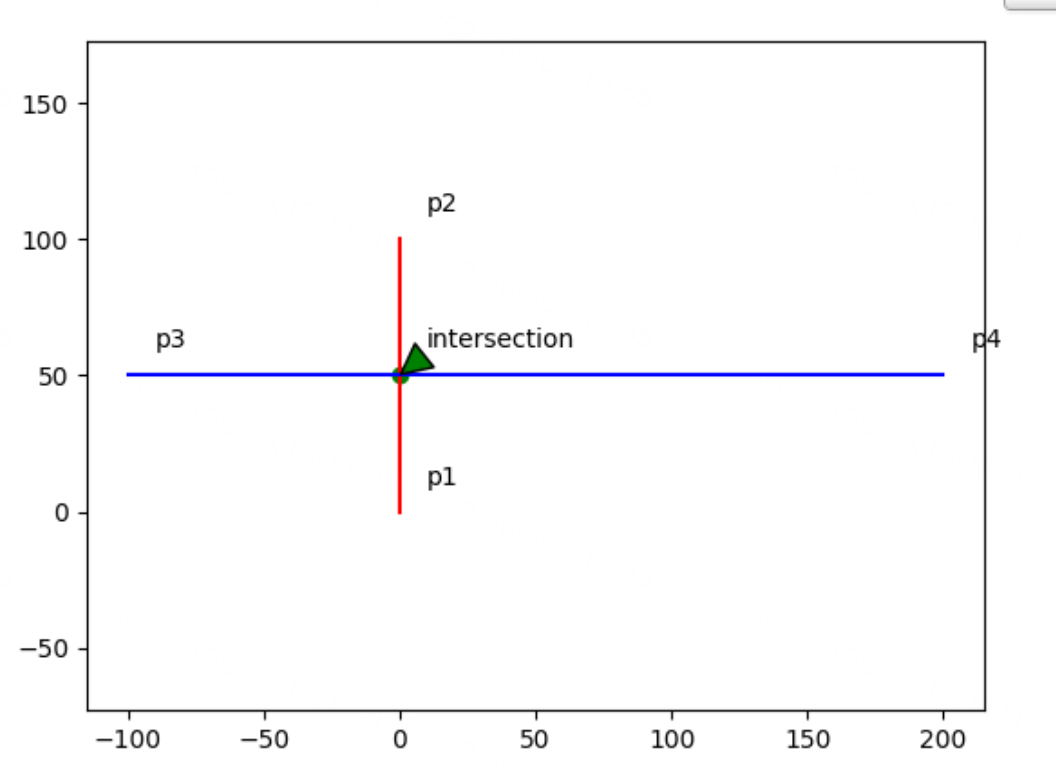
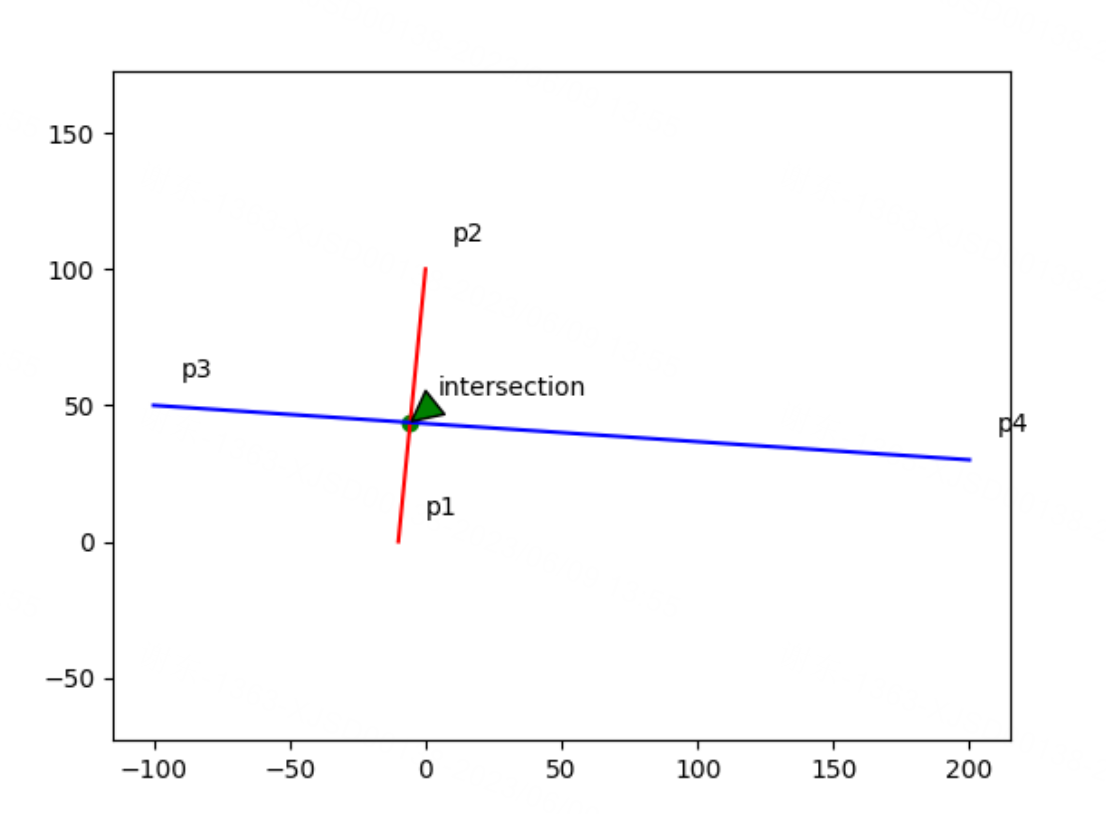
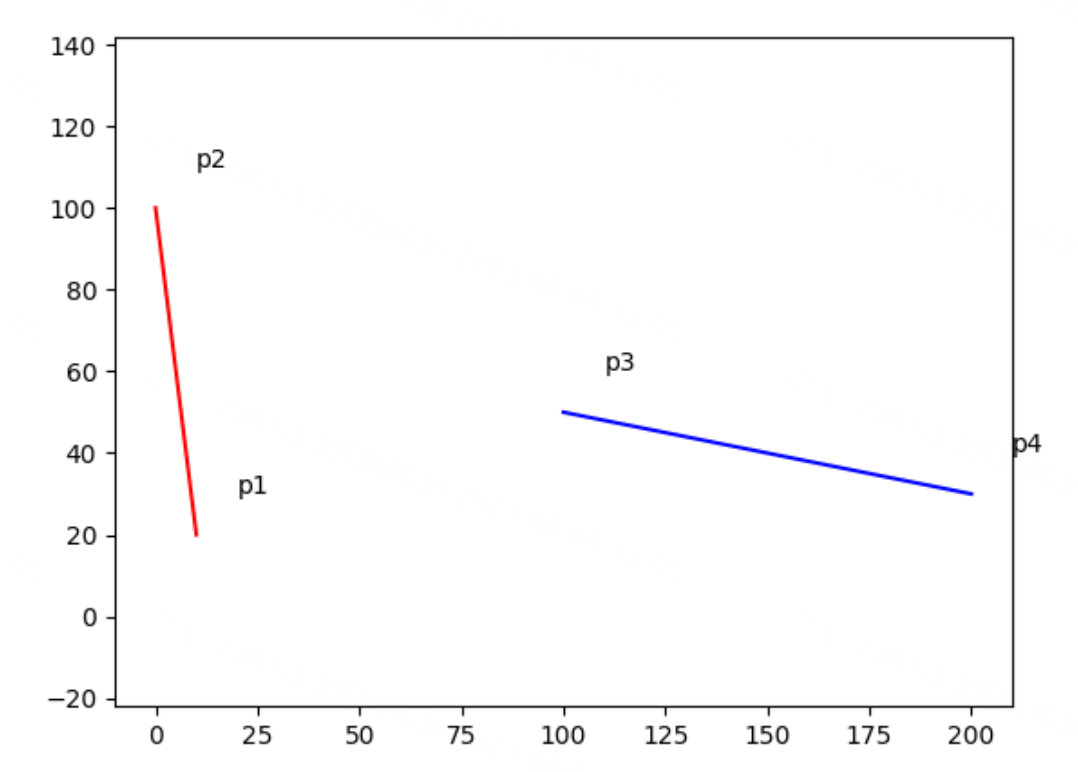
不相交:
C++ 借助opencv的数据结构
cpp展开代码float cross(const cv::Point2f& p1, const cv::Point2f& p2, const cv::Point2f& p3) {
float x1 = p2.x - p1.x;
float y1 = p2.y - p1.y;
float x2 = p3.x - p1.x;
float y2 = p3.y - p1.y;
return x1 * y2 - x2 * y1;
}
bool has_intersect(const cv::Point2f& p1, const cv::Point2f& p2, const cv::Point2f& p3, const cv::Point2f& p4) {
// 快速排斥,以l1、l2为对角线的矩形必相交,否则两线段不相交
if (std::max(p1.x, p2.x) >= std::min(p3.x, p4.x) // 矩形1最右端大于矩形2最左端
&& std::max(p3.x, p4.x) >= std::min(p1.x, p2.x) // 矩形2最右端大于矩形最左端
&& std::max(p1.y, p2.y) >= std::min(p3.y, p4.y) // 矩形1最高端大于矩形最低端
&& std::max(p3.y, p4.y) >= std::min(p1.y, p2.y)) { // 矩形2最高端大于矩形最低端
// 若通过快速排斥则进行跨立实验
if (cross(p1, p2, p3) * cross(p1, p2, p4) <= 0
&& cross(p3, p4, p1) * cross(p3, p4, p2) <= 0) {
return true;
}
else {
return false;
}
}
else {
return false;
}
}
bool has_intersect(const std::vector<cv::Point2f>& seg1, const std::vector<cv::Point2f>& seg2) {
return has_intersect(seg1[0], seg1[1], seg2[0], seg2[1]);
}
// compute_intersection: 计算两条线段的交点
// 原理:计算两条线段的斜率和截距,然后解方程
cv::Point2f compute_intersection(cv::Point2f p1, cv::Point2f p2, cv::Point2f p3, cv::Point2f p4) {
cv::Point2f intersection;
if (p1.x == p2.x) {
intersection.x = p1.x;
float slope2 = (p4.y - p3.y) / (p4.x - p3.x);
float intercept2 = p3.y - slope2 * p3.x;
intersection.y = slope2 * intersection.x + intercept2;
} else if (p3.x == p4.x) {
intersection.x = p3.x;
float slope1 = (p2.y - p1.y) / (p2.x - p1.x);
float intercept1 = p1.y - slope1 * p1.x;
intersection.y = slope1 * intersection.x + intercept1;
} else {
float slope1 = (p2.y - p1.y) / (p2.x - p1.x);
float slope2 = (p4.y - p3.y) / (p4.x - p3.x);
float intercept1 = p1.y - slope1 * p1.x;
float intercept2 = p3.y - slope2 * p3.x;
if (slope1 == slope2) {
// if p1[0] <= p3[0] <= p2[0]:
if (p1.x <= p3.x && p3.x <= p2.x) {
return p3;
} else if (p1.x <= p4.x && p4.x <= p2.x) {
return p4;
} else {
return {-1, -1};
}
}
}
return intersection;
}
如果对你有用的话,可以打赏哦
打赏


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!
目录