目录
功能
硬件:MSP430G2553开发板,两个步进电机拉杆、2个步进电机驱动、一个按键模块、一个oled 0.96 iic模块。
软件功能:
(1)当按键K1按下时(短按),X方向步进电机正向运转,X正向移动1mm。(算为1mm)
(2)当按键K2按下时(短按),X方向步进电机反向运转,X反向移动1mm;(算为1mm)
(3)当按键K3按下时(短按),Y方向步进电机正向运转,Y正向移动1mm;(算为1mm)
(4)当按键K4按下时(短按),Y方向步进电机反向运转,Y反向移动1mm;(算为1mm)
(5)当按键K1~K4长按时电机连续运动,直到释放时停止
(6)OLED实时显示步进电机转过的步数和X或Y向移动的距离(屏幕上步数和距离按 1mm对应1显示8步)
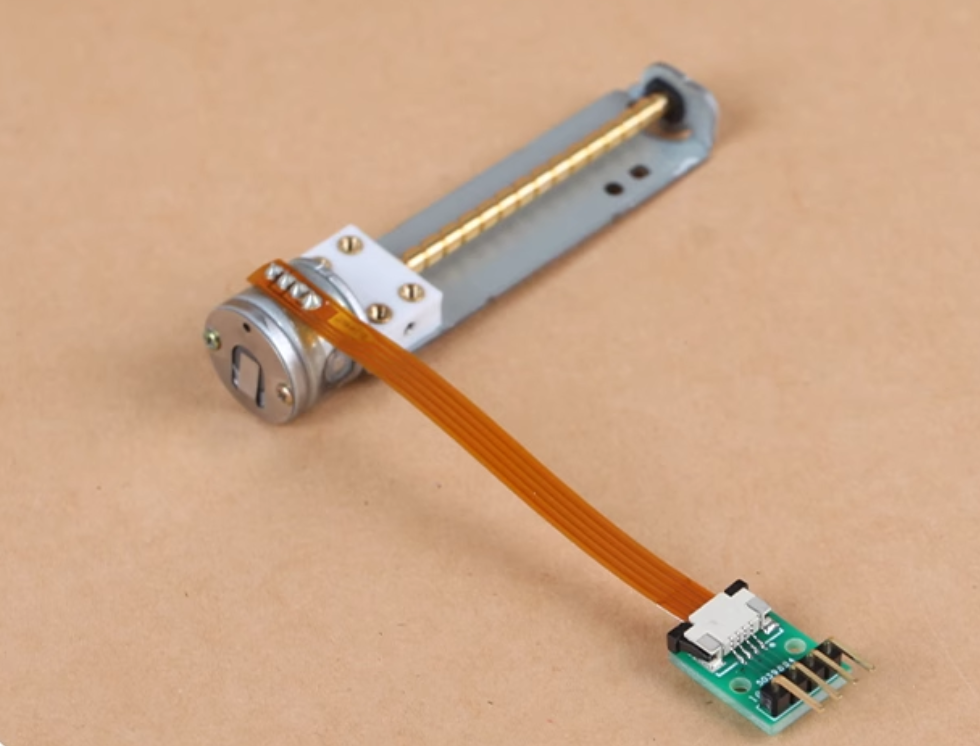
步进电机拉杆
买的是这种四线二相步进电机。
步进电机简介
步进电机是一种将电脉冲信号转换为机械位移的装置。与传统电机不同,步进电机每转一步都是固定的角度,因此非常适用于需要精确控制的场合。四线二相步进电机是其中一种常见类型,每相线圈对应一对引脚。
步进电机工作原理
步进电机通过按特定顺序依次给线圈通电来产生步进运动。每次给一组线圈通电,电机就会转动一个步进角度。这种通电顺序决定了电机的转动方向和步进精度。
代码讲解
程序控制一个四线二相步进电机。以下是代码和相应的解释:
c展开代码unsigned char FFW[8] = {0x01, 0x03, 0x02, 0x06, 0x04, 0x0c, 0x08, 0x09};
unsigned char REV[8] = {0x09, 0x08, 0x0c, 0x04, 0x06, 0x02, 0x03, 0x01};
void SETP_MOTOR_FFW1(unsigned char n) {
unsigned char j;
for (j = 0; j < 8; j++) {
P1OUT = (P1OUT & 0xF0) | (FFW[j] & 0x0F); // 只控制低四位
delay_ms(30);
}
}
数据数组解释
-
FFW和REV数组定义了电机向前(FFW)和向后(REV)移动的顺序。每个数组元素控制电机线圈的通电状态。-
0x01-> 0001 -
0x03-> 0011 -
0x02-> 0010 -
0x06-> 0110 -
0x04-> 0100 -
0x0C-> 1100 -
0x08-> 1000 -
0x09-> 1001
-
这些值通过改变电机线圈的通电顺序实现步进运动。
函数解释
SETP_MOTOR_FFW1函数用于控制电机向前移动n步。虽然参数n被传递给函数,但在函数体内并没有被使用,实际执行的步数是 8 步(数组长度)。
c展开代码void SETP_MOTOR_FFW1(unsigned char n) {
unsigned char j;
for (j = 0; j < 8; j++) {
P1OUT = (P1OUT & 0xF0) | (FFW[j] & 0x0F); // 只控制低四位
delay_ms(30);
}
}
-
for (j = 0; j < 8; j++): 循环 8 次,对应 8 个步进状态。 -
P1OUT = (P1OUT & 0xF0) | (FFW[j] & 0x0F): 只修改P1OUT的低四位,控制电机的步进状态。 -
delay_ms(30): 每次步进后延时 30 毫秒,确保电机有足够的时间完成每一步。
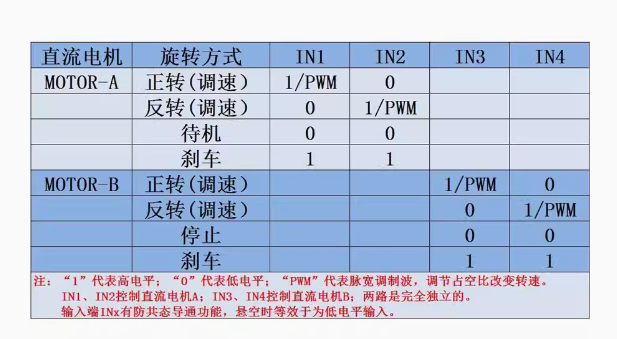
四线二相步进电机控制
对于四线二相步进电机,每相有两个线圈,控制每个线圈的通电状态即可实现步进。你的代码中,FFW 数组和 REV 数组分别定义了顺时针和逆时针的步进顺序。
关键点总结
-
步进: 每次改变
P1OUT的低四位值,电机就步进一次。 -
延时:
delay_ms(30)用于控制步进速度。 -
方向控制: 使用不同的数组(
FFW或REV)可以控制电机的旋转方向。
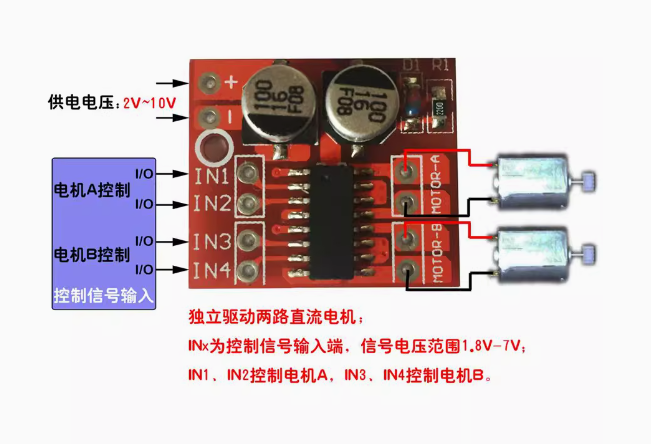
步进电机驱动器
买的这个,四根线安装的时候就可以控制步进电机了。
code
cpp展开代码https://docs.qq.com/sheet/删除此汉字后打开DUEdqZ2lmbmR6UVdU?tab=BB08J2


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!