【单片机】DS2431芯片,读写128个字节,程序
目录
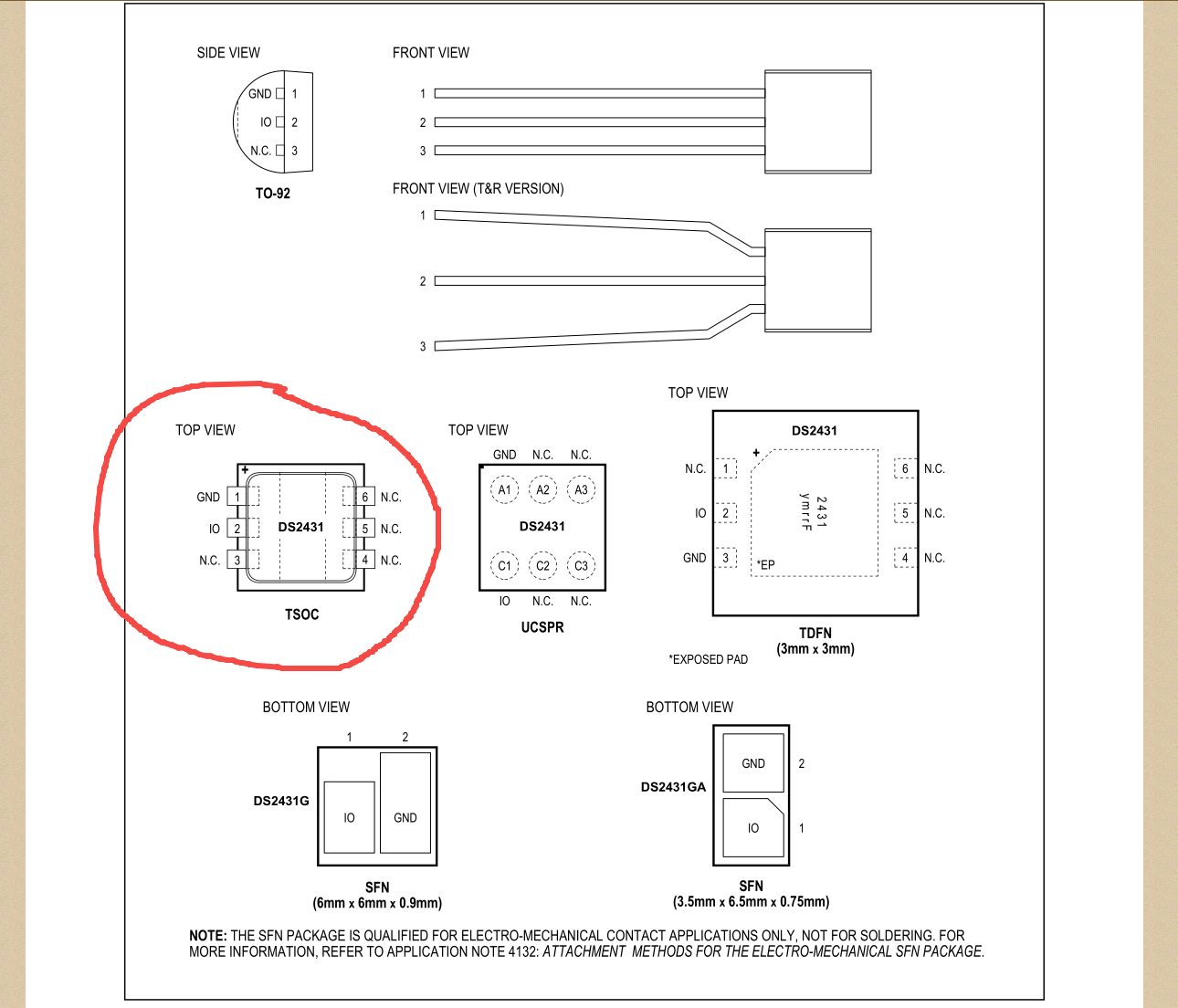
ds2431p+t&r
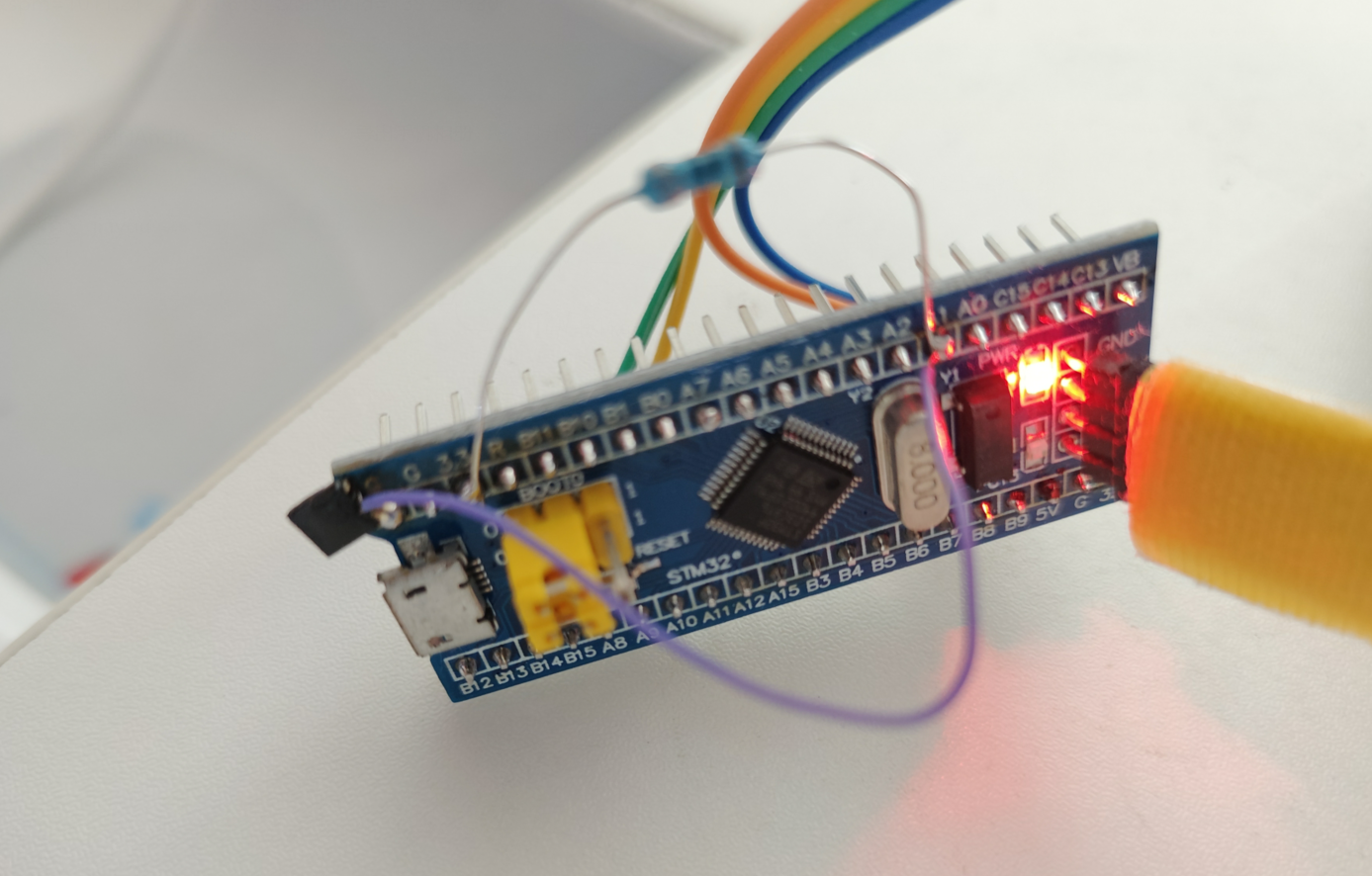
stm32读写程序:
部分程序:
cpp展开代码#include "sys.h"
#include "delay.h"
#include "usart.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "sys.h"
#include "DS2431.h"
unsigned char serialNb[8];
unsigned char read_data[129] = {11, 2, 3, 4, 5, 6, 7, 8, 9, 10,
111, 2, 3, 4, 5, 6, 7, 8, 9, 10,
11, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
11, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
11, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
11, 2, 3, 4, 5, 6, 7, 0xff};
unsigned char write_data[129] = {11, 2, 3, 4, 5, 6, 7, 8, 9, 10,
111, 2, 3, 4, 5, 6, 7, 8, 9, 10,
11, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
11, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
11, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
1, 2, 3, 4, 5, 6, 7, 8, 9, 10,
11, 2, 3, 4, 5, 6, 7, 0xff};
unsigned char status;
unsigned char debug = 0; /* 0: release, 1: debug Õý³£¸ø0 */
u8 tim_data_finish_status = 0;
u8 start_tim = 0;
u8 rev_data_uart_buffer[600];
int rev_data_uart_buffer_cnt = 0;
int rev_counter_deal = 0;//´¦ÀíµÄʱºòµÄ¼ÆÊýÆ÷
u8 rev_data_tmp = 0; //´¦ÀíµÄʱºòµÄÁÙʱ±äÁ¿
u8 rev_sm_cnt = 0; //´¦ÀíµÄʱºòµÄ¼ÆÊýÆ÷
u8 check_ifg = 0; //´¦ÀíµÄʱºòÊÇ·ñÐèÒª´¦Àí
u8 retry = 3;//ÖØÊÔ´ÎÊý
u8 success_all = 0;//ÊÇ·ñ³É¹¦
int main(void) {
int idx = 0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); /* ÉèÖÃNVICÖжϷÖ×é2:2λÇÀÕ¼ÓÅÏȼ¶£¬2λÏìÓ¦ÓÅÏȼ¶ */
delay_init(); /* ÑÓʱº¯Êý³õʼ»¯ */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); /* ¹Ø±Õjtag£¬Ê¹ÄÜSWD£¬¿ÉÒÔÓÃSWDģʽµ÷ÊÔ */
delay_ms(500); /* µÈ´ýÎȶ¨ */
uart_init(115200); /* uart */
printf("************************************************ \r\n");
printf("************************************************ \r\n");
if (debug == 0) {
while (1) {
status = DS2431_Init();
printf("DS2431_Init status: %d\r\n", status);
if (DS2431_ReadRom(serialNb) == 0) {
printf("ÒѾ¶ÁÈ¡µ½ÐòÁÐÂë: %02X %02X %02X %02X %02X %02X %02X %02X\r\n",
serialNb[7],
serialNb[6],
serialNb[5],
serialNb[4],
serialNb[3],
serialNb[2],
serialNb[1],
serialNb[0]);
/* Check serial number CRC */
if (crc8(serialNb, 7) != serialNb[7]) {
printf("CRCУÑ鲻ͨ¹ý£¬Ð¾Æ¬ÓÐÎÊÌâ.\r\n");
} else {
printf("CRC8 УÑéͨ¹ý£¬Æ÷¼þ´¦ÓÚÕý³£¹¤×÷ÖС£ \r\n");
break;
}
} else {
printf("ûÓжÁÈ¡µ½ÐòÁÐÂ룬ÇëÁ¬½ÓÆ÷¼þ¡£ \r\n");
}
delay_ms(1000);
}
}
delay_ms(100);
printf("************************************************ \r\n");
printf("************************************************ \r\n");
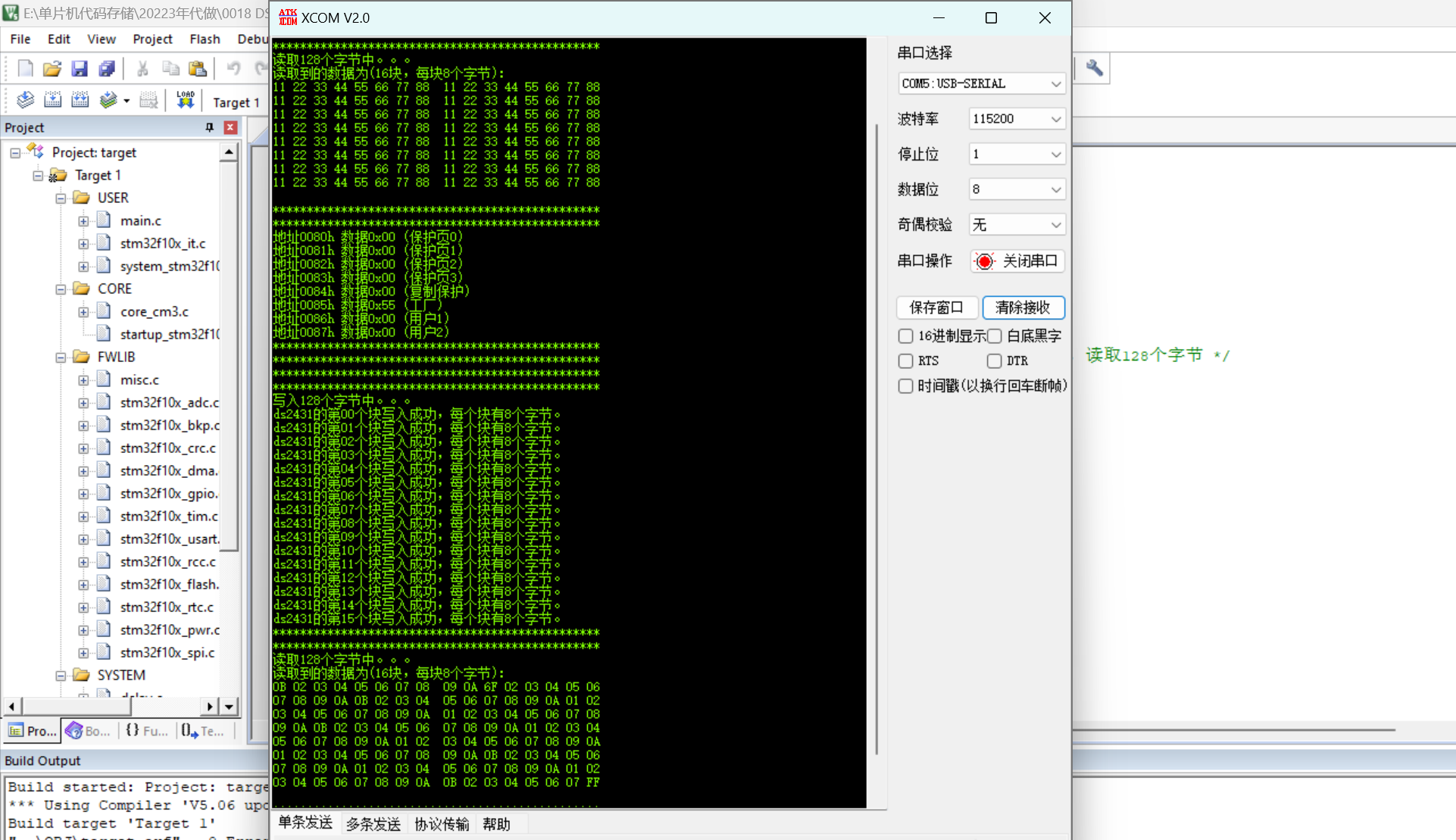
printf("¶ÁÈ¡128¸ö×Ö½ÚÖС£¡£¡£ \r\n");
if (debug == 0) {
status = DS2431_ReadMemory(0, 128, read_data); /* ´ÓµØÖ·0¿ªÊ¼¶ÁÈ¡£¬¶ÁÈ¡128¸ö×Ö½Ú */
} else {
status = 0; /* 0: success */
}
/* ´òÓ¡³ö¶ÁÈ¡µ½µÄÊý¾Ý */
if (status == 0) {
printf("¶ÁÈ¡µ½µÄÊý¾ÝΪ(16¿é£¬Ã¿¿é8¸ö×Ö½Ú)£º \r\n");
for (idx = 0; idx < 128; idx++) {
printf("%02X ", read_data[idx]);
if ((idx + 1) % 8 == 0) {
printf(" ");
}
if ((idx + 1) % 16 == 0) {
printf("\r\n");
}
}
printf("\r\n");
} else {
printf("¶Áȡʧ°Ü£¬´íÎóÂëΪ%d¡£ \r\n", status);
}
printf("************************************************ \r\n");
printf("************************************************ \r\n");
//¶ÁÈ¡ÆäËûµØÖ·µÄÊý¾Ý
memset(read_data, 0, sizeof(read_data));
DS2431_ReadMemory(0x80, 8, read_data);
printf("µØÖ·0080h Êý¾Ý0x%02X (±£»¤Ò³0)\r\n", read_data[0]);
printf("µØÖ·0081h Êý¾Ý0x%02X (±£»¤Ò³1)\r\n", read_data[1]);
printf("µØÖ·0082h Êý¾Ý0x%02X (±£»¤Ò³2)\r\n", read_data[2]);
printf("µØÖ·0083h Êý¾Ý0x%02X (±£»¤Ò³3)\r\n", read_data[3]);
printf("µØÖ·0084h Êý¾Ý0x%02X (¸´ÖƱ£»¤)\r\n", read_data[4]);
printf("µØÖ·0085h Êý¾Ý0x%02X (¹¤³§)\r\n", read_data[5]);
printf("µØÖ·0086h Êý¾Ý0x%02X (Óû§1)\r\n", read_data[6]);
printf("µØÖ·0087h Êý¾Ý0x%02X (Óû§2)\r\n", read_data[7]);
printf("************************************************ \r\n");
printf("************************************************ \r\n");
delay_ms(100);
printf("************************************************ \r\n");
printf("************************************************ \r\n");
printf("дÈë128¸ö×Ö½ÚÖС£¡£¡£ \r\n");
for (idx = 0; idx < 16; idx++) {
status = DS2431_WriteMemory(idx, write_data + idx * 8);
if (status == 0) {
printf("ds2431µÄµÚ%02d¸ö¿éдÈë³É¹¦£¬Ã¿¸ö¿éÓÐ8¸ö×Ö½Ú¡£ \r\n", idx);
} else {
printf("ds2431µÄµÚ%02d¸ö¿éдÈëʧ°Ü£¬´íÎóÂëΪ%d¡£ \r\n", idx, status);
}
}
delay_ms(100);
printf("************************************************ \r\n");
printf("************************************************ \r\n");
printf("¶ÁÈ¡128¸ö×Ö½ÚÖС£¡£¡£ \r\n");
if (debug == 0) {
status = DS2431_ReadMemory(0, 128, read_data); /* ´ÓµØÖ·0¿ªÊ¼¶ÁÈ¡£¬¶ÁÈ¡128¸ö×Ö½Ú */
} else {
status = 0; /* 0: success */
}
/* ´òÓ¡³ö¶ÁÈ¡µ½µÄÊý¾Ý */
if (status == 0) {
printf("¶ÁÈ¡µ½µÄÊý¾ÝΪ(16¿é£¬Ã¿¿é8¸ö×Ö½Ú)£º \r\n");
for (idx = 0; idx < 128; idx++) {
printf("%02X ", read_data[idx]);
if ((idx + 1) % 8 == 0) {
printf(" ");
}
if ((idx + 1) % 16 == 0) {
printf("\r\n");
}
}
printf("\r\n");
} else {
printf("¶Áȡʧ°Ü£¬´íÎóÂëΪ%d¡£ \r\n", status);
}
printf("************************************************ \r\n");
printf("************************************************ \r\n");
while (1) {
}
}
void USART1_IRQHandler(void) /* ´®¿Ú1ÖжϷþÎñ³ÌÐò */
{
u8 Res;
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) /* ½ÓÊÕÖжÏ(½ÓÊÕµ½µÄÊý¾Ý±ØÐëÊÇ0x0d 0x0a½áβ) */
{
Res = USART_ReceiveData(USART1); /* ¶ÁÈ¡½ÓÊÕµ½µÄÊý¾Ý */
}
}
全部程序
ds2431p+t&r 是这个封装:
TSOC封装:
如果对你有用的话,可以打赏哦
打赏


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!
目录