完整代码工程打开获取:
bash展开代码https://github.com/xxddccaa/blog_code_search
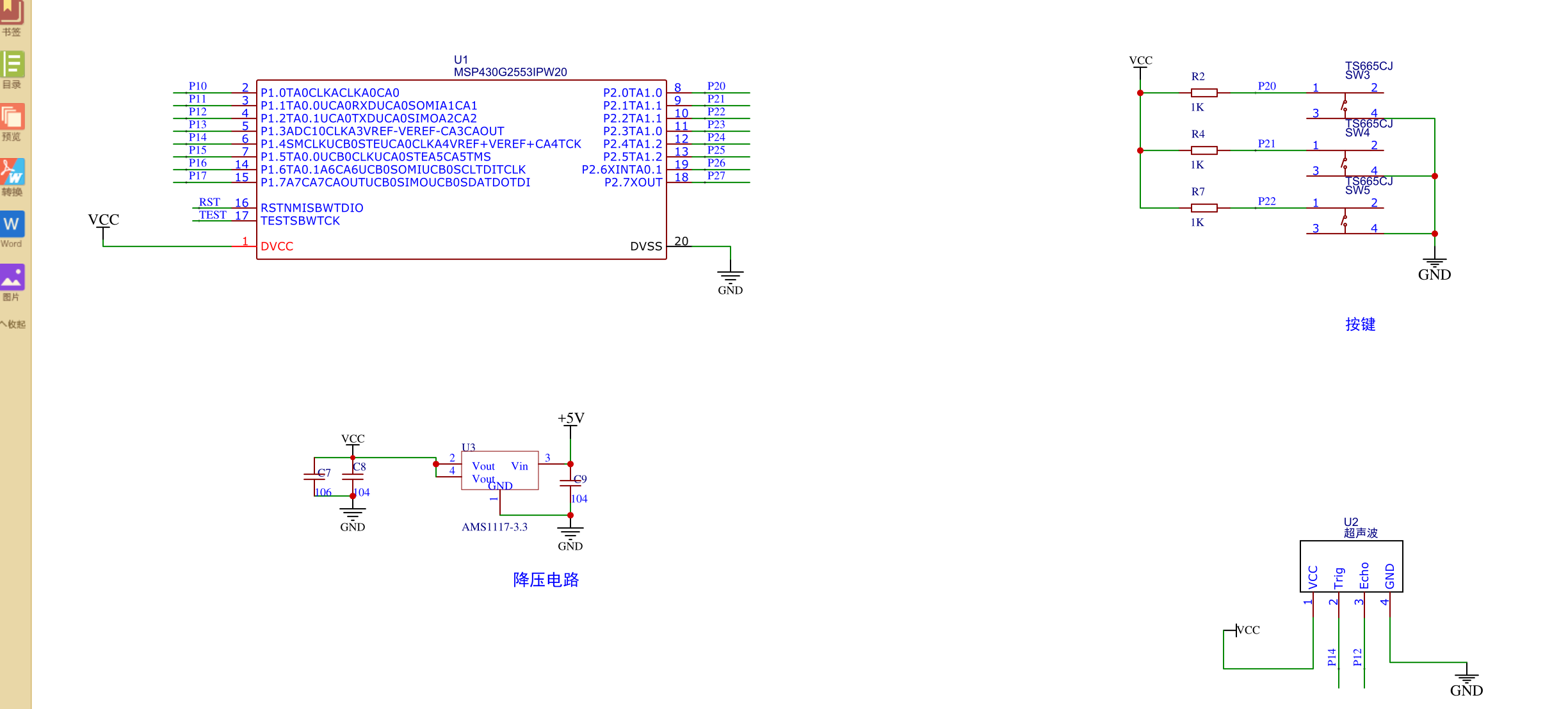
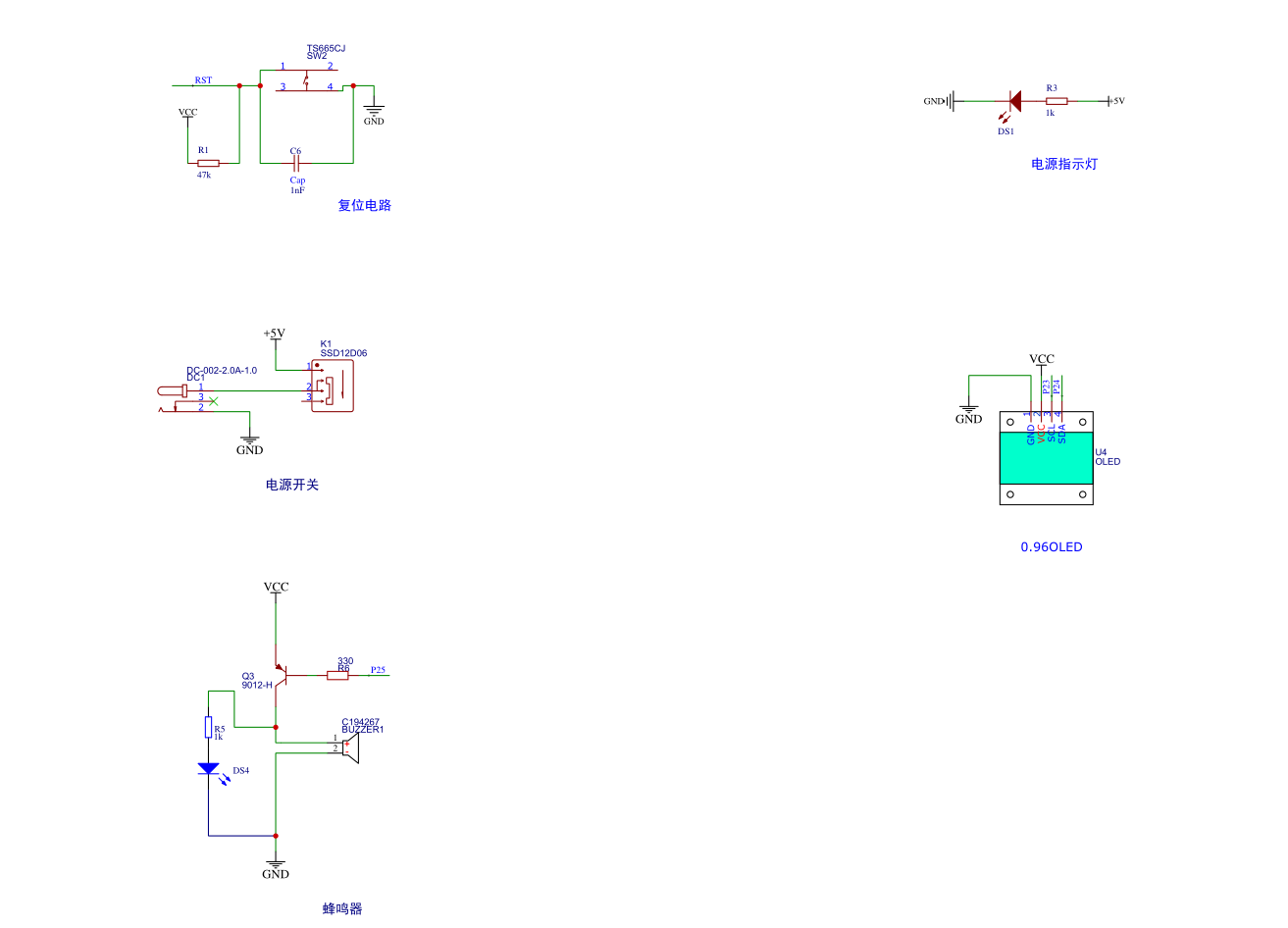
这段代码是为MSP430微控制器编写的,旨在与超声波距离传感器(例如HC-SR04)进行交互,以测量距离并根据测得的距离控制蜂鸣器。以下是代码功能的详细解析:
-
包含语句:
- 代码包含了MSP430、标准输入/输出操作(
stdio.h)和一个OLED显示模块(OLED.h)所需的头文件。
- 代码包含了MSP430、标准输入/输出操作(
-
宏定义:
- 包括数据类型(
uchar、uint、ulong)、GPIO引脚配置和基于CPU频率的延迟函数的各种宏定义。
- 包括数据类型(
-
全局变量:
-
用于存储DHT11传感器数据(温度和湿度)的变量。
-
与超声波距离测量相关的变量(
distance、capV、time_cishu、success_flag)。 -
定义可接受距离范围(
sr04_distance_low和sr04_distance_high)和当前模式的常量。
-
-
函数声明:
-
init_sys:初始化系统,配置按钮和蜂鸣器的GPIO引脚。 -
read_key:读取按钮的状态。 -
read_key_2:非阻塞方式读取矩阵键盘值的函数。 -
display_high_low:在OLED屏幕上显示高低距离值。 -
control_beep:根据测得的距离控制蜂鸣器。 -
main:程序从这里开始执行的主函数。
-
-
主函数:
-
为MSP430配置时钟设置。
-
初始化OLED显示和超声波传感器GPIO。
-
在OLED上显示中文字符表示“超声波距离限制”。
-
进入无限循环以进行连续操作。
-
读取模式并根据按钮按下调整距离限制。
-
在OLED上显示调整后的高低距离限制。
-
根据测得的距离控制蜂鸣器。
-
触发超声波传感器,测量距离并在OLED上显示。
-
-
Timer_A中断处理程序:
-
处理来自Timer_A的中断。
-
捕获超声波传感器回波信号的上升和下降沿。
-
根据沿之间的时间差计算距离。
-
更新
success_flag以指示成功的距离测量。
-


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!